


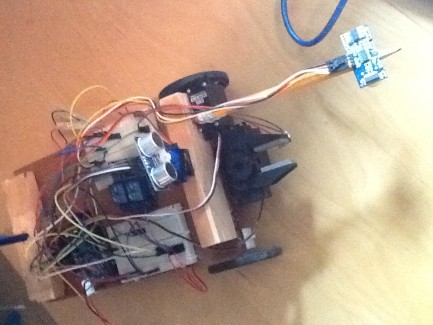
My First Robot
This is a robot that can be controlled by a wii nunchuck, or it can navigate on its own. It avoids cliffs with the ultrasonic sensor on the front arm, and it avoids obstances with the front-facing ultrasonic sensor. It has a grabbing device on the front which is powered by a servo. It can go backwards (only with one wheel) using the relay ( I only had one pair of relays). It has a pen for a back wheel, which slides along the ground with relatively low friction. It can be controlled by a wii nunchuk. I got the code to connect the wii nunchuck and arduino from: http://todbot.com/blog/.
. It is powered by 4 batteries. In the videos it is plugged into an outlet because I did not have any batteries on hand.
navigates via ultrasound, controlled by wii nun chuck
- Actuators / output devices: GM3
- Control method: wii nunchuck(optional)
- CPU: Arduino Duemilanove
- Power source: 4x 1.2v rechargitble batteries
- Programming language: C
- Sensors / input devices: HCSR04 ultrasonic sensor, SPDT Snap Lever switch
- Target environment: hard indoor surface