



My first robot
This is my first robot :) very simple line follower using 2 photoresistors and atmega microcontroller, I used a plastic box as chassis and two plastic nuts as wheels, powered by 2 nokia cells 1 for the controller and the other for the servos.
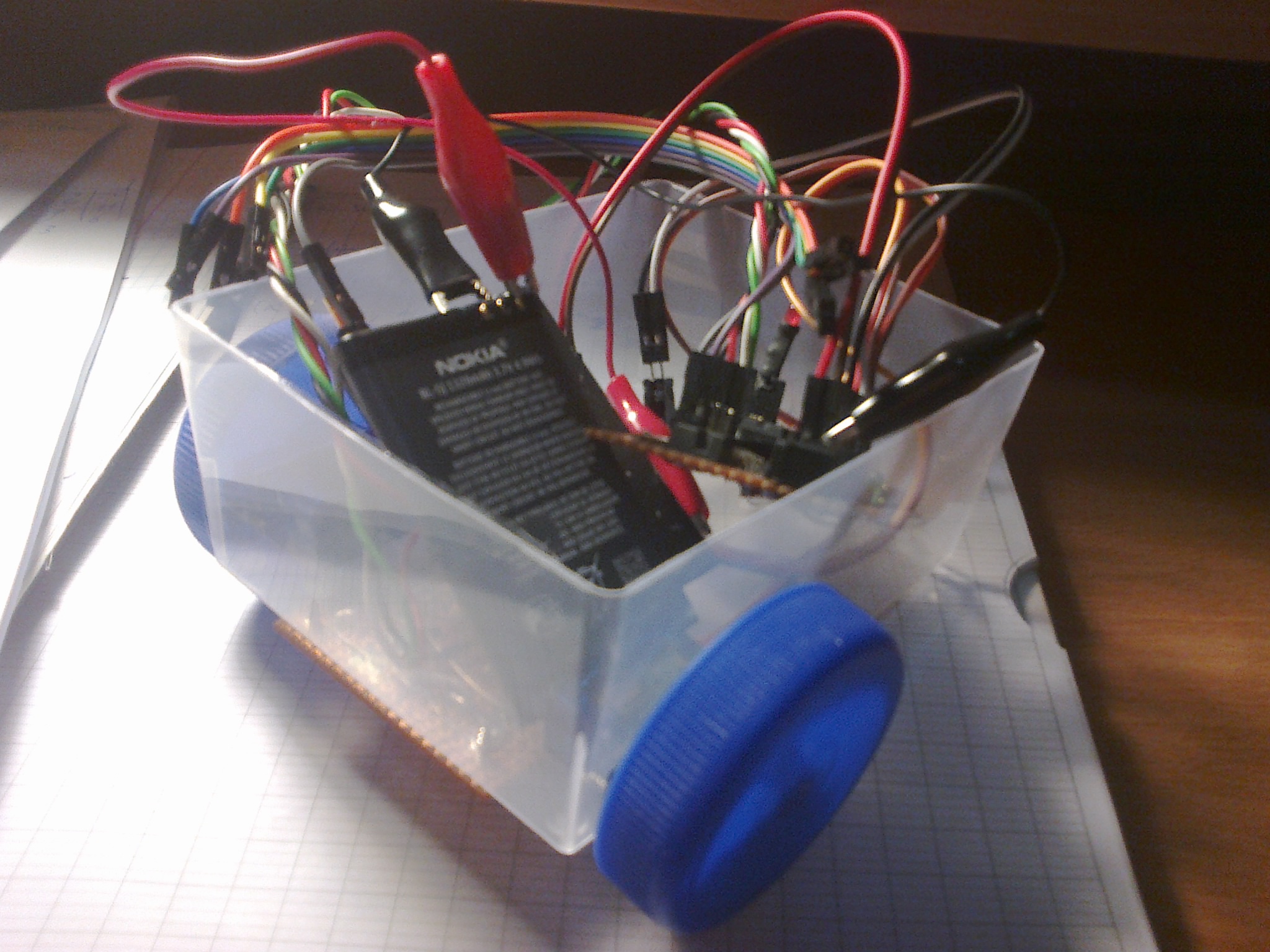
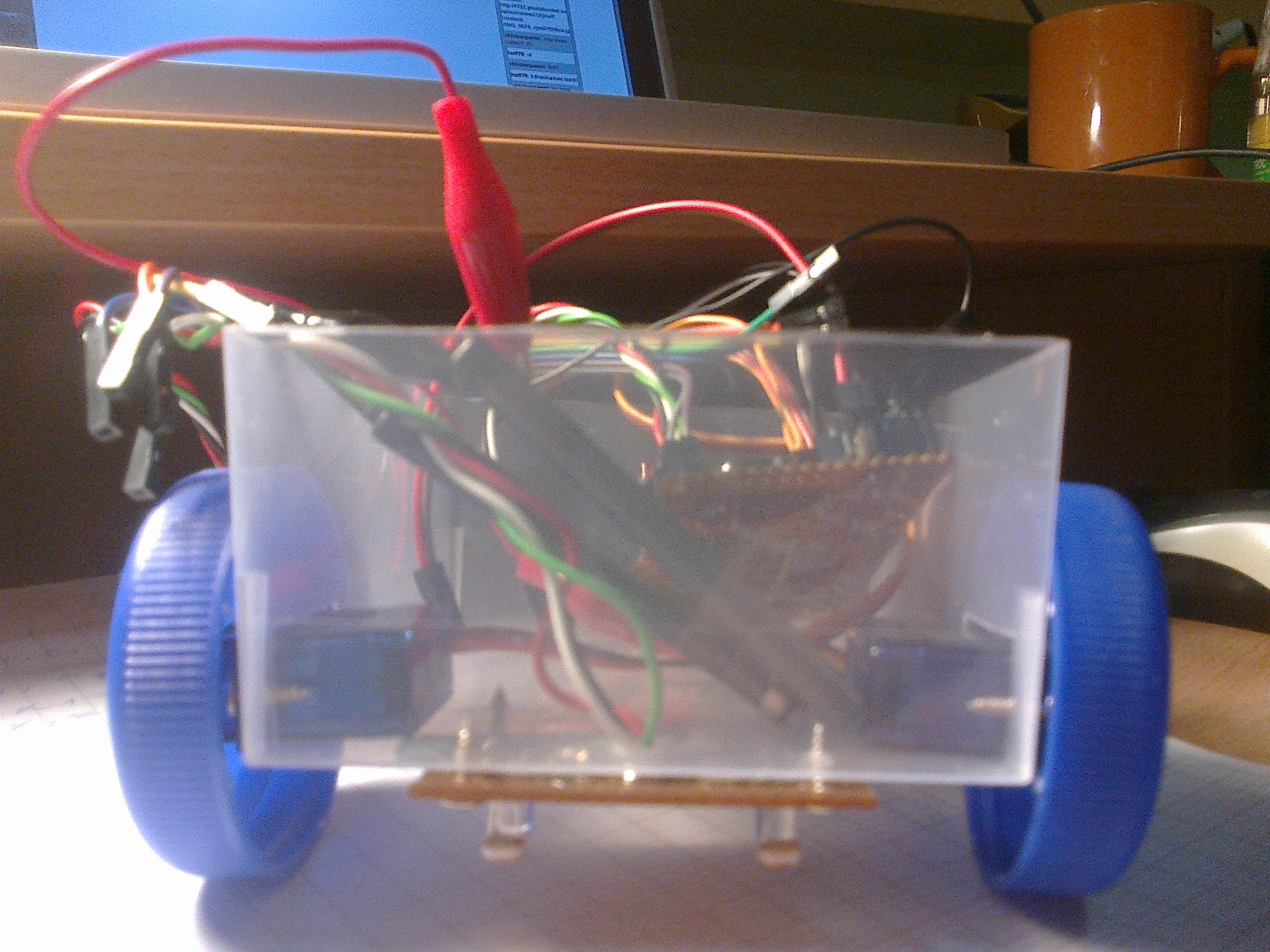
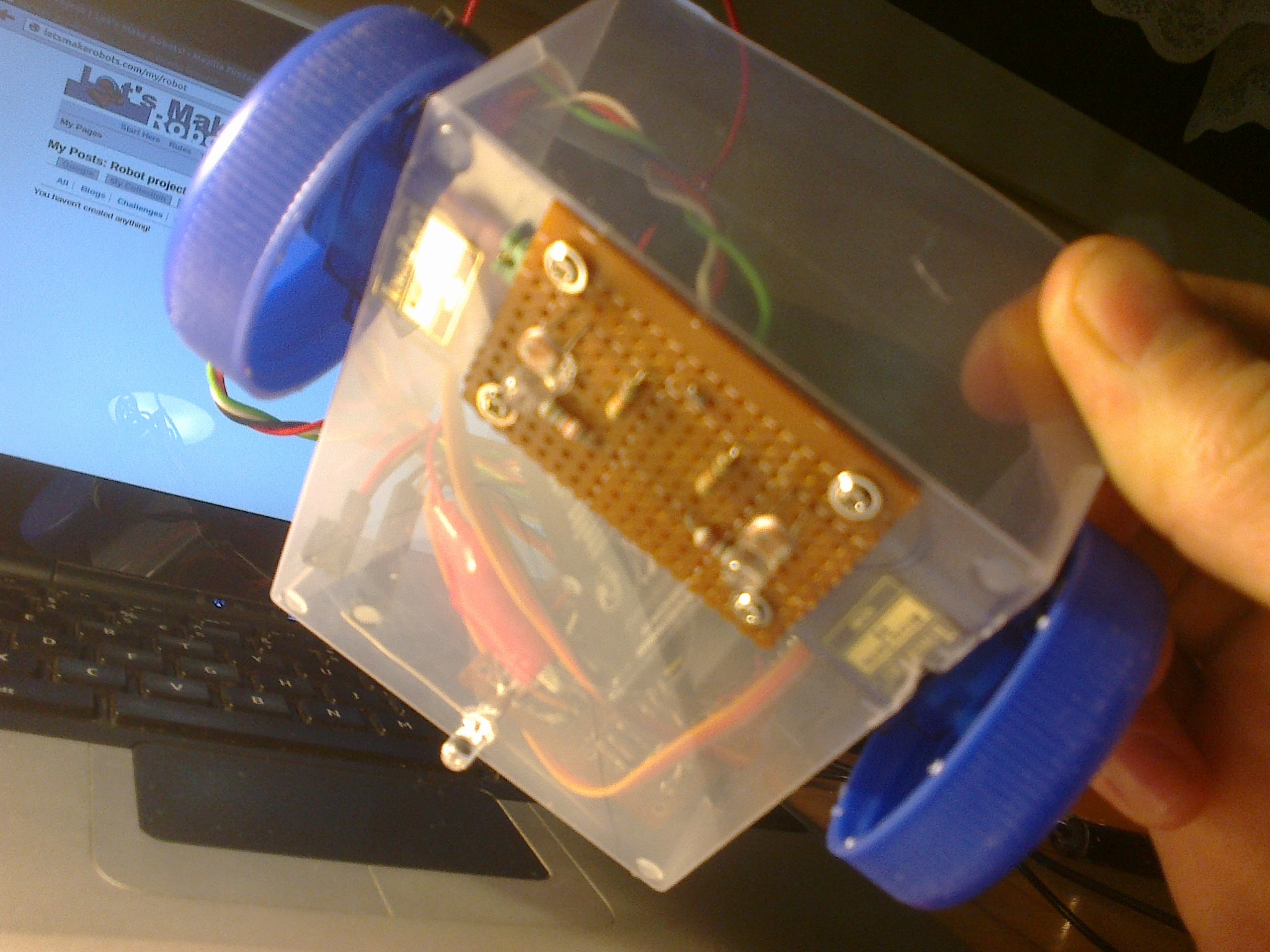
- Actuators / output devices: 2 X Servos
- CPU: atMega8
- Power source: 2 x nokia batteries
- Programming language: C
- Sensors / input devices: 2x light dependant resistors (LDRs)
- Target environment: indoor