


My first Robot
So I'm new to LMR, and this is my first robot. For now, it's just an Arduino Uno, a motor driver circuit, and two motors. The motor driver circuit I got from here: https://www.robotshop.com/letsmakerobots/node/2074 - thanks heaps to guibot, that circuit solved a problem I've for yonks.
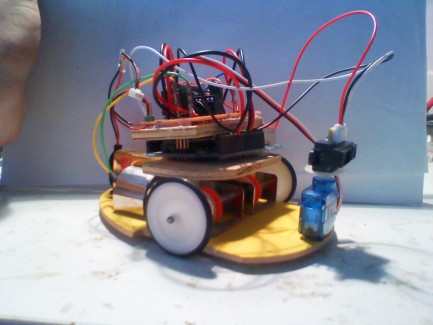
The base, motors and gearboxes were ripped from a kit I had, a line-tracking bot from Dick Smith, which didn't work (one of the transistors literally exploded), the Arduino was from . . . well, Arduino, and the motor driver circuit was built from guibot's schematic (see above link). There are two bits of wood between the Arduino and the gearboxes, and the motor control and the Arduino, to prevent shorting. It's powered by 4 x AAA batteries.
UPDATE (29/1/11): I got a Sharp GP2Y0A21YK IR sensor, and a servo, and mounted the first on the latter (so the sensor can look around, but I haven't got that far), and replaced the 4 x AAA batteries with a 9v, and now the robot is an obstacle avoider: when it senses an object, it stops, chooses a random angle, rotates that angle around to the left or right, then continues on its merry way.
Am currently having problems with the gearboxes; one seems to drive faster than the other, and if I use PWM to slow it down, it stops completely. But I will continue to work on this. Future plans for this bot are now: driving around instead of away from obstacles, and hopefully after a drive mapping out its path in Processing.
Thanks for reading.
Avoids obstacles
- Actuators / output devices: standard 4.5v motors
- CPU: arduino uno
- Power source: 9v battery
- Programming language: Arduino programming language
- Sensors / input devices: SHARP IR sensor
- Target environment: indoors mainly