



My First Real Robot
Just got some of the part through mail still missing some ,so i still strated doing half of the work untill my shippment. 



Can't wait untill i get all of my part so i can actually fiinish building my first robot and really experiment with alot of cool thing's. keep all posted as soon as i get New parts.:)
update!!!!! 8-3-08
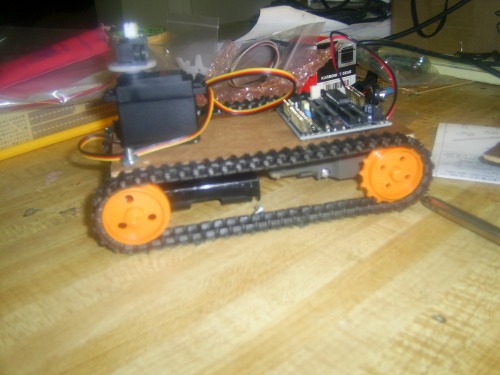
got all the parts just finish hooking everything up and is ready to be program...

It was a great experience building this bot . I'am sure i well be making some upgrades gradually.(servo's speakers led,etc..)
updates!!!!!!
8-14-08
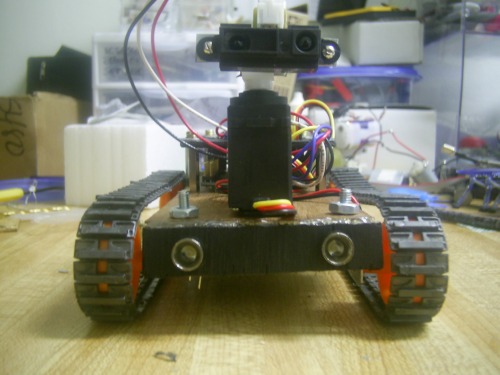
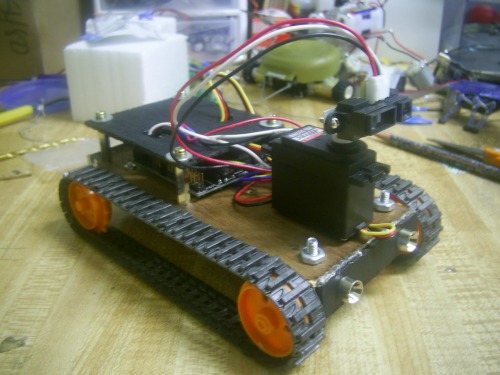
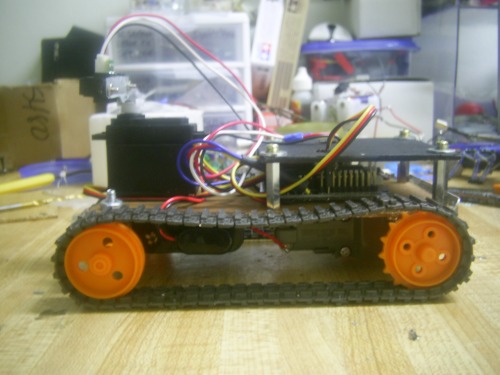
Allrighty guy .....ahhhhh just finally upgraded my bot .. with a little something extra like a extra small level so i can put Future things on it like(speakers,servo,ect..) Got some Led on it and whipped up i stronger chassis. Here i took some more pic. This project is coming along very nice i have so much fun working on it the i can't stop "I have LetsMakeRobot Fevers X).. Anyways hope you like the pics..

UPDATES!!!!!!!!!! 9-03-08
Hello robotics Friends... Just started to think that, it will be cool to make a robotic arm.Whether it has 5 DOF (degree of freedom) 4 DOF or 3-2DOF it will be cool just to make one and controlled it either make a transmitter or atomonously.Well i had a deep thought, why don't i make a robotics arm, with just some of the stuff i got lying around my house. And better yet let me make a Robotics arm, and make it mobile. So i Grab my first bot and decided to start building.
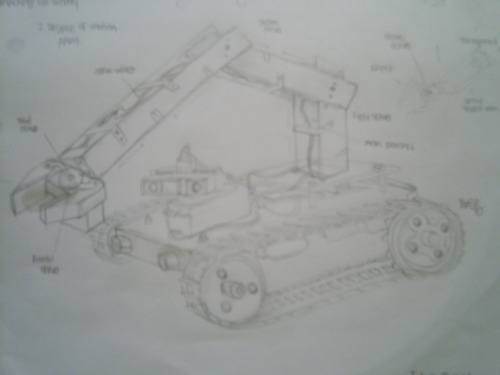
Here is a sketch i drawed about the design.Sorry for the quality of the camera or the drawing.It's going to be a Arm with 2 degree of freedom , Not counting the mobility of the bot.i will use 4 servo's. one for the shoulder one for the elbow one for the wrist and then one for the gripper.I started to make the shoulder it coming alone quit good.

Will be posting more, As i go. :)
UPDATES!! 9-7-08
got some more pics with the elbow and wirst done but still need to attached the gripper doe


Here's an UPDATE on my First Robot with a Robotic Arm on it ,With no gripper yet.
- Actuators / output devices: Tamiya twin gearbox
- Control method: autonomous
- Sensors / input devices: Sharp GP2D120 IR sensor
- Target environment: indoors mainly