


My first omniwheeler
Update: Hmm.. I found that it pulls a trailer really well.. Hmm.. And the Omni's are really easy to navigate. Hmmm :)
I was waiting for my omni wheels to arrive, because I wanted to see if they where not the right thing for my main project.
While waiting and working on other small stuff, I got interested in making my own Mecanum Wheels.
After making that proof of concept, I decided to make 4 stable ones, and put them on a test-platform.
I got some triangled wood, drilled holes in it, and cut it in 64 pieces..

Double sided tape on;

Marked up 4 CD's:
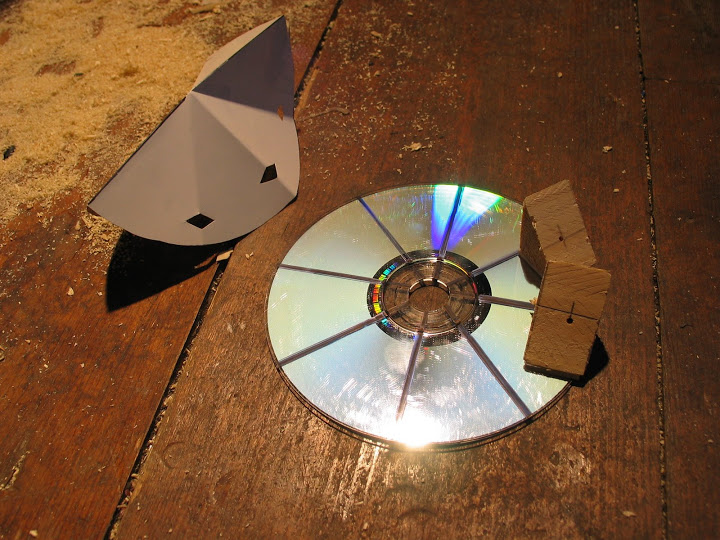
Metal sticks in the holes, wheels on..

Till I had 4 wheels - of the homemade "Mecanum Wheels" - type:

Made 4 continous servos, and glued the wheels up on them:

...
And THEN I got mail:

WHAM! To hell with homemade wheels, I am back on testing for my main project :)
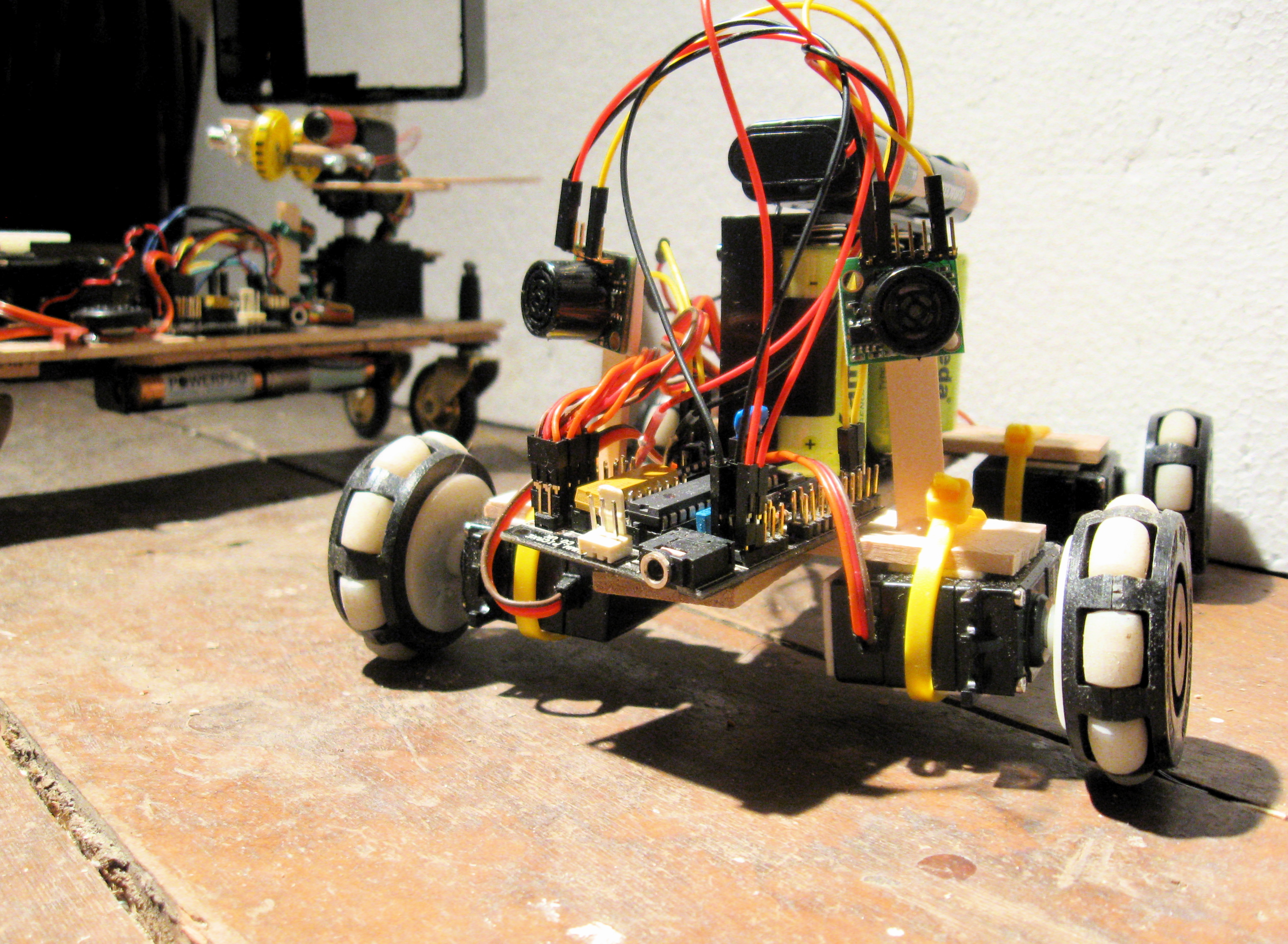
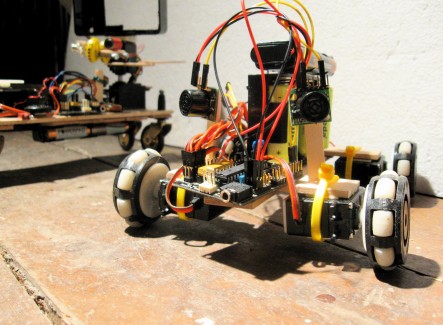
Really fast made, as you can tell, I stuck new wheels and some sensors and an old picaxe 28A board on the simple frame.
Made some code very fast one evening (atached, read it, it's short compared to how complex it performs), to test how to navigate with the setup of these interesting wheels..
Result & what I learned:
Really fun & effective, wicked fun to code omni! - check code. Info: servo passive is at 135, not 150, because I set them up with another controller.First commands, "servo" is just to initiate servos, they are set for real by the "servopos" commands
I think I may have to make more tests (read: Have more fun with new wheels) before moving on with the project :)
Sorry it's no fantastic robo-post, but it is & was my first omniwheeler, a simple robot, but I had to post it because the moves are new :D
(Have to clean up my workshop now, I know, a mess, must clean up!)
- Actuators / output devices: 4 servos
- Control method: undefined
- CPU: Picaxe 28A
- Operating system: Picaxe
- Power source: 4 DD cells, 4 AA calls
- Programming language: Picaxe basic
- Sensors / input devices: Maxbotix EZ2
- Target environment: indoor