


My first line follower
So, here's what happened...
I was building the "Start here" robot and as I kept thinking of new little bits and bobs to add I struck a bit of a wall. I wanted to have a propeller on top that would turn on and off whenever the robot was moving forward for a few seconds without obstacles. Turbo mode style! The problem was that the picaxe signal was not enough to turn the little fan motor on so I needed a transistor there. I did not feel confident adding anything that said "amplify" to the circuit until I understood what it did and how so I decided to create a circuit from more basic bits (Not from ICs). After looking around I found that simple line following robots would be able to teach me these simple circuit related truths.
I laid the whole circuit on a solderless bread board and it actualy worked. I understood how transistors, resistors and batteries interacted. Fascinating! This is what took the longest, by far. I also kept being interrupted by lack of proper tools and the urgent need to go get them right then and there.
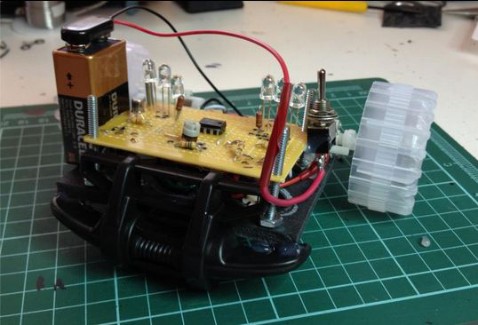
Then came time to solder it all on a board. In retrospect, I should have picked a bigger board as my first point-to-point soldering project but since the little guy ended up looking really good and working perfectly (sorta) I was very happy.
The only little glitch I got on the circuitry side was the first time I tested it. After scratching my head a while at the very erratic behaviour I realized I had hooked it up to follow a white line on a black board and not the opposite as I had first thought. Oh well...
The mechanical section of the project was a bit of a challenge because I started with two 12V motors that were way out of scale with the rest of the robot. Even if I only gave them a little bit of juice they ended up threatening to rip the poor thing apart. They also required me to use a bigger base and tougher methods to attach them to the chassis which only managed to illustrate that I am lacking in the construction of the mechanical bits. I am still very weary of the next time I need to devise a system of axles. That is obviously an area I need to improve on.
Still, in the end I went back to a small servo motor that I modified to spin freely. I could then go back to my old favorites: Foamcore and glue gun to create the body and stick the parts to it. I kept the original nut and bolt setup for the main board as I really liked the look. I glued on a plastic bumper from the scavanged toy car I got the wheels from hoping it would prevent the front from catching but it turned out that it was more like a plow. I had to put in a piece of twisted wire with a small cylinder bit to act as a front wheel. Worked like a charm. I then decided to skip the battery holder and just glue it directly onto the foamcore base.
The wheels then just needed a rubber band for extra traction and my new minion was ready for stroll.
Follows a line, intrigues pets
- Control method: white line
- Power source: 9v battery
- Sensors / input devices: Photoresistors
- Target environment: Indoors is best, black surface with a white line