



My first attempt at a hexapod walker.
I was so impressed by the video of the Pololu hexapod walker I thought I'd have a go at one of my own. This is a rebuild of my initial attempt using a PicAxe 08m. It's still held together with small dabs of hot-glue and will-power. I've refined the 'just make it do something' code and the new movement routine will be at the core of the program once I move this to an 18x. Currently it can dance and vibrate and can go forwards, backwards and rotate left and right at anything from an absolute crawl to full speed. Still a bit of code tweaking needed to get gradual turns left and right and optimise the leg sweep.
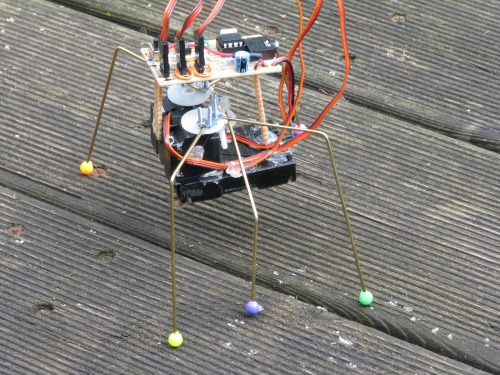
The component layout is different to the Pololu model, having the batteries underneath and the servos at the front. The beads on the feet give it a carpet capability but still some experimentation to do here. For the gait to work, there has to be some slip but not too much. (*Just discovered - the mid legs need grip - I've taken the beads off the middle and now it's brilliant on carpet*) The pics and video are pretty rough - short of time at the moment, but I will post something better as it develops.
I'll be using an 18x later as code space on the 'm' range is too tight for the things I've got planned. I want to include elements of my Instructables 'Piecax' project in here as well as obstacle avoidance with a Sharp IR sensor.
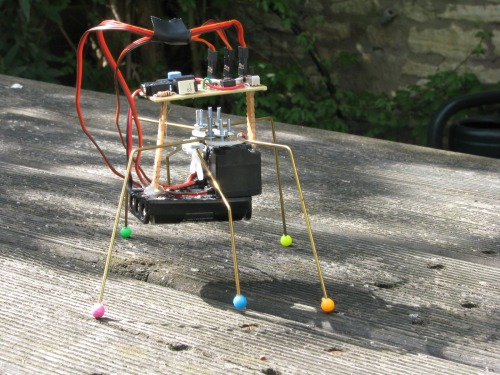
Test bed for a 6 legged, 3 servo walker.
- Actuators / output devices: 3 x 10.5g servo.
- Control method: Autonomous.
- CPU: PicAxe 08m.
- Power source: 3 x AAA batteries.
- Programming language: Picaxe basic
- Sensors / input devices: None as yet - Sharp IR ranging planned.
- Target environment: Indoor environment - Hard floor or short carpet.