


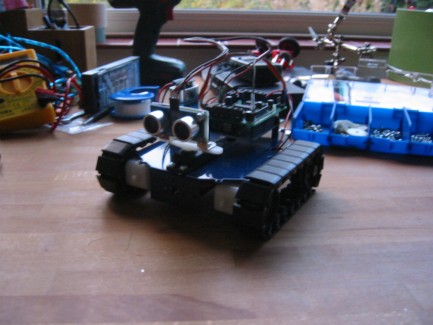
My first arduino rover.
This is my first robot rover I built with an arduino duemilanove and an Adafruit motorshield. It is not my first attempt however. The motors, tracks and metal frame were bought as a kit. The rover uses a Parallax Ping))) sensor to detect objects.
I plan to add infrared refectors and bumper switches in the future to make sure it does not drive of the table.
Navigate around via ping))) ultrasound detector.
- Actuators / output devices: 2 solarbotics GM9 gearmotors (143:1), 1 standard servo
- CPU: Arduino Duemilanove (328)
- Power source: 1 9v & 4AA's
- Programming language: C
- Sensors / input devices: Ping))) Ultra Sound
- Target environment: Indoors - Carpet