


My first arduino robot
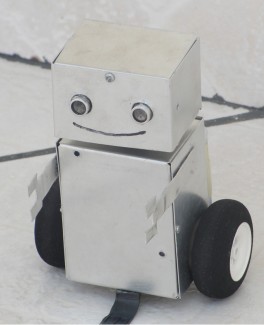
The first arduino robot I made.
It's simple, he runs around and detects obstacles and walls, changing the side that he runs.
I spent around 60 hours to build this, including the alluminium head that I had to cut and modify.
It uses 4 1,5v batteries and walks with a Tamiya dual motor gearbox controlled by a L293D H-bridge and uses a turnigy 9g servo to turn his head.
After so many obstacles, I finally completed it. Hope everybody likes! :)
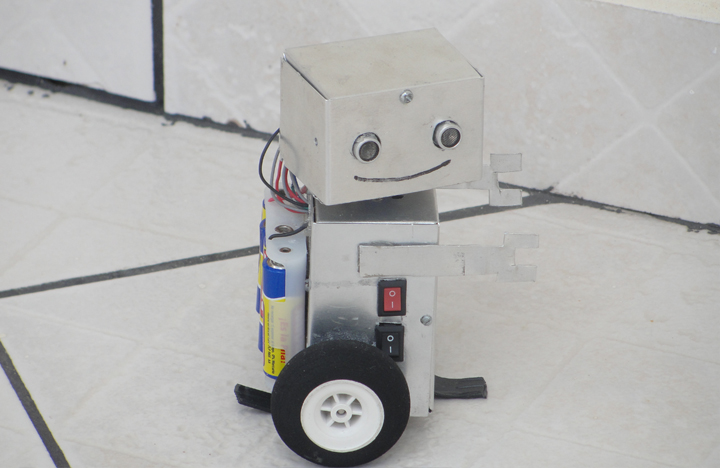
Right side :D
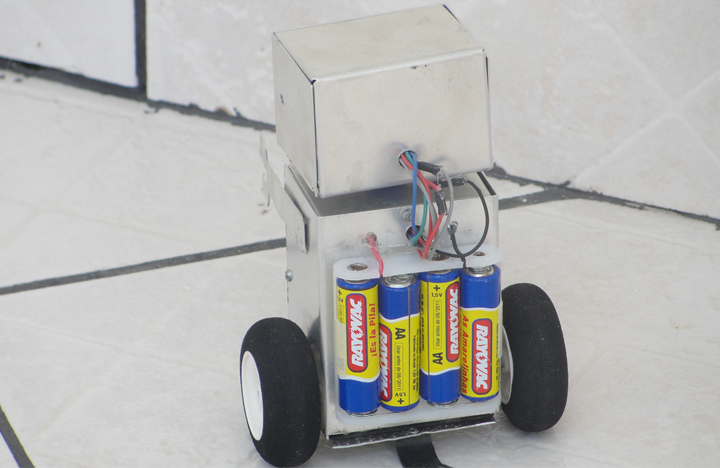
Back side :)
Navigates around via ultrasound
- Actuators / output devices: tamiya dual motor gearbox
- Control method: autonomous
- CPU: Arduino duemilanove - ATmega328
- Operating system: Arduino
- Power source: 6v and 9v battery
- Programming language: Arduino C
- Sensors / input devices: ultrasonic
- Target environment: indoor runner