


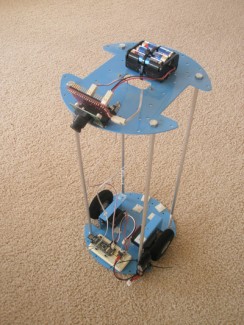
My Arduino + CMUcam indoor rover.
Update 20/09/2008: A major milestone has been reached! The robot can navigate around a otterman, two shoes, my leg and a kitten using just the CMUcam's averaging function and some Arduino clevers. The latest video is the top one. The code for the robot is attached as well.
Update 18/09/2008: I have installed a pair of Solarbotics "Secret" L293D Motor Drivers in the Rogue Blue's servo casings and have added a video showing a test of them in action. I have also uploaded the Arduino code used for the demo video. The motor drivers replaced the pair of TIP122 power transistors that were providing the original stop/go functionality.
Brief Overview
This is my first real robot. It is an "never-ending" project, started a year ago, that is intended to be a test bed for any ideas/projects I think of over the next couple of years. Currently it is handling the interfacing between an RS232 CMUcam1 and an Arduino (Stickduino).
This LMR entry is a little basic at the moment as I created it on impulse, to accompany my main blog at (http://thisismyrobot.blogspot.com). I will replace the following with more detail shortly, and in the meantime there is a stack of info on my blog.
To summarise, the platform is based on a Rogue Blue chassis from Trossen Robotics (http://www.trossenrobotics.com/store/p/3166-Rogue-Blue-ERS.aspx), which I have expanded vertically using very thin hollow aluminium tubing and some large diameter bolts that (just) thread into it. The base seems to be able to handle a couple of battery-packs and a microcontroller or two thanks to the servo gearing.
Navigates around and indoor environment using a CMUcam and Arduino (for now)
- Actuators / output devices: 2 x 111oz Servos, 2 x 3inch foam wheels
- CPU: Arduino Decimila (Stickduino)
- Power source: 7.4V 15C LiPoly pack for motors, 6 AA pack for Electronics.
- Programming language: Arduino C
- Sensors / input devices: CMUcam1
- Target environment: indoors, carpet