



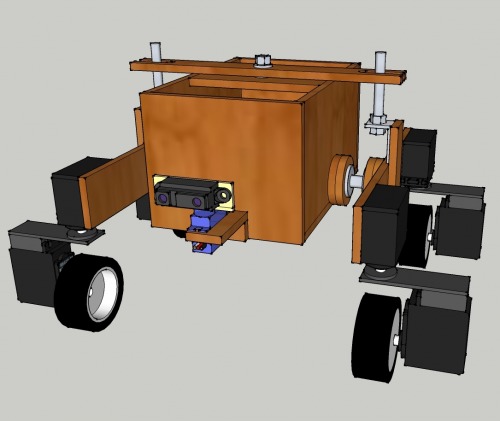
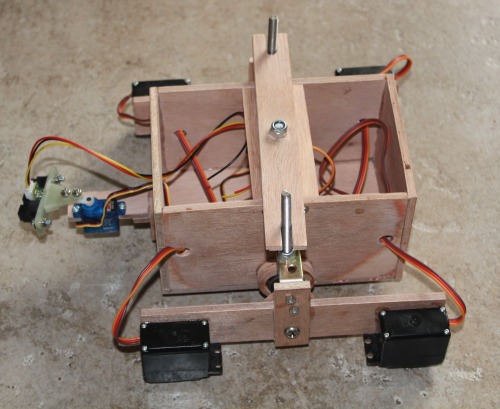
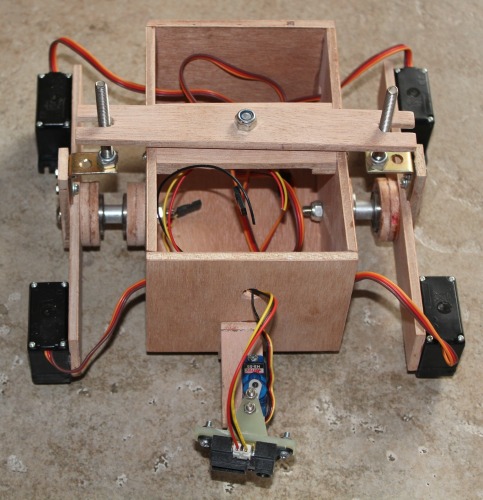
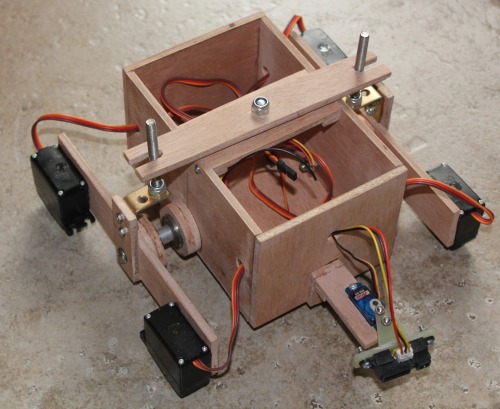
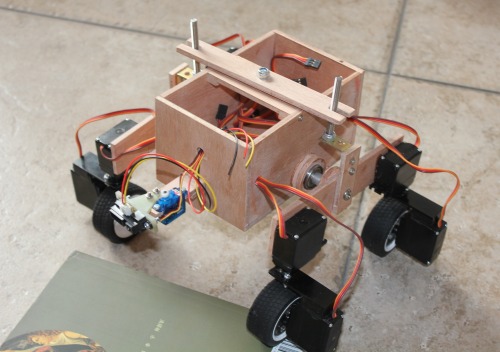
My 4WD rocker-bogie suspension rover
Not much to say, I am building another robot with a rocker-bogie suspension similar like the Mars rover Sojourner has.

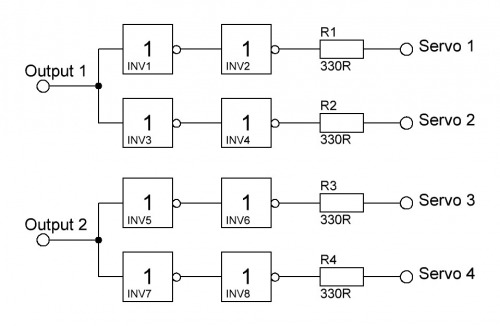
As two wheel alignment servos always moving simultaneously, they can be controlled by one output via inverters:
2011.3.2
Started to program my rover and came up with following idea for obstacle avoidance:

The Sharp IR will be moved by a servo to 11 positions. On every position the distance will be measured and stored in a word variable. If one of measured distances exceeds a given level, the rover will turn on the spot to the opposite side to avoid the obstacle. If none of the 11 distances exceeds a given level, the ∑ of w0 to w4 and the ∑ of w6 to w10 will be built. Then it will be evaluated if the ∑ of w0 to w4 > ∑ of w6 to w10 or ∑ of w0 to w4 < ∑ of w6 to w10 and the according positive difference calculated. If the difference exceeds not a defined value, the rover moves forward. If the difference exceeds a defined value the rover also starts a obstacle avoidance by turning on the spot away from the according side.
TBC
roams around on rough terrain and avoids objects
- Actuators / output devices: 4 continues rotating servos, 5 normal servos
- Control method: autonomous
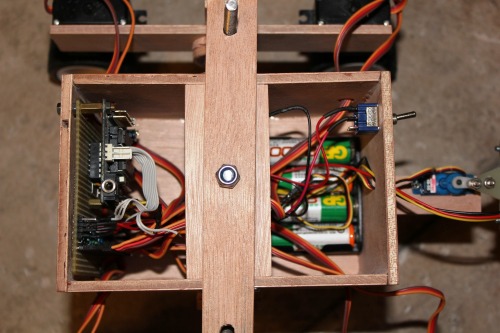
- CPU: Picaxe 28x1
- Power source: 4 x 1.2V NiCd batteries, 2400mAh
- Programming language: Picaxe basic
- Sensors / input devices: Sharp GP2D120 IR sensor
- Target environment: Indoor or outdoor