


MULTI-BOT V 2
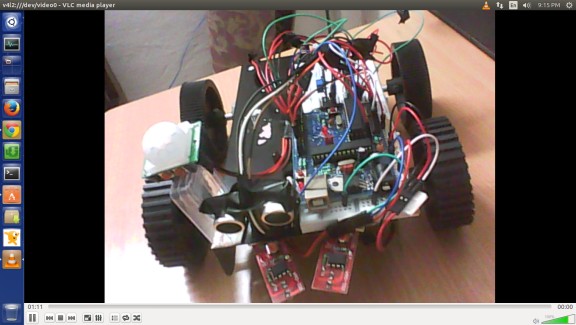
This is the multibot that is built as an all purpose robot. The multibot is based on the arduino uno .
1. Arduino Uno
2 Light intensity Sensor
3 Coloured Line Sensor
4 Ultrasonic Sensor
5 PIR motion sensor
Communication with
1 Bluetooth Hc05
2 IR transmitter receiver ( Working on this)
Movement With
1 300 RPM DC 12 V MOTORS ON L298N (2)
2 300 RPM MOTOR ON CONTIINUOUS 12 V SUPPLY (2)
(WAITING to get a new motor driver)
EDIT 1 : Added new sketch through which the robot acts as a sensor value transmitter to a smartphone
EDIT 2 ; Added new code which turns the robot to
1 obstacle robot
2 line follower
3 line plus obstacle robot
4 bright light follower
5 bright light avoider
6 bright follower with obstacle
on command by the smartphone
TYPE Light Intensity Avoider / Follower, Line follower , Obstacle avoider , Motion sensor , Normal Driving