



MTE v1 (Mobile Tracked Explorer)
The MTE v1 is a tracked robot that autonomously rolls around looking for new areas. Well as random as can be anyway.
The project originally started out as a BOE-BOT-esque robot because i did not want to pay to buy the expensive kit. Thats right, MTE originally was Basic Stamp 2 controlled, but after researching the Propeller micro and seeing firsthand what it could do, i was hooked.
The MTE is NOT finished, I have ordered a few PCBs to clean it up, but they have not arrived yet. Also, even when they do arrive they will NOT work. I tend to be a little impatient in ordering. A redesign is in order after buying new battery sources and reconfiguring.
Schematics to come!
UPDATE 7/25/2009: PCBs that I had ordered arrived yesterday. :) BUT there is, as i had found out before they arrived looking at the Gerbers, a problem with the wiring so they are not fully working. The propeller is turning on, but that is about it. The programming port, for the PROP PLUG is wired incorrectly also so i am using soldered jumper wires to fix it for the time being, until i can order more PCBs. I will be uploading a few photos for you here, but ALL photos can be viewed, along with all of my projects, on my Morris-Works website.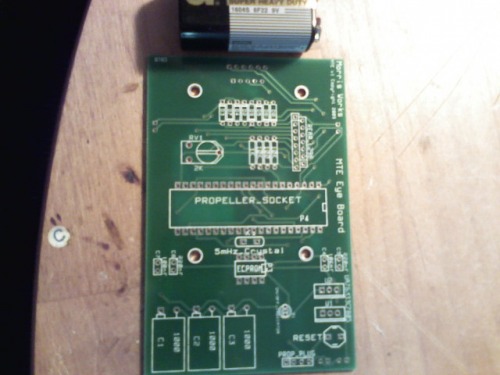

Again sorry for the crude photos.... still have yet to find my camera charger.
Navigate with IR object detection.... thats about it so far.
- Actuators / output devices: 2x GM9 (Solarbotics) 143:1 powered by L293D Driver
- Control method: autonomous
- CPU: Parallax Propeller
- Power source: Currently 12
- Programming language: Spin
- Sensors / input devices: Panasonic (PNA4602) IR Detectors with Standard IR Emitters
- Target environment: Indoor or outdoor works great.