


Mrk 2 of my first IR line follower
This is my project for the Btec course electrical and electronic engineering. I am in my second year and have to do a project, so i decided to do a robot. Had a few ideas but until i found LMR i was undecided. i wanted to do a ultra-sonic proximity robot or a infra-red module robot but until my college said they can’t get the parts because their suppliers have a minimum order of a hundred for both the input devices i need to change my idea. In the end i steeled for a line follower.
Input device
I used two IR Phototransistors and two IR emitters. The phototransistor i originally used with the ADC value on the pic but after some time delays i decided to use a dual comparator.
I have also used a micro switch on the front to stop it trying to mine its way in to any obstacle.
CPU
the massive picaxe 40X2 to the discus of my lecture saying i only got it because it was the biggest, well he might be slightly right =]
Output device
motors i have a dual gear box with three interchangeable ratios, at the moment i have it on the highest because the MRK1 robot i did, it had a high ratio something like 1.20 and two 5v motors so after that robot i have a slightly to big ratio of 1.288 but i am thinking after my algorithm is perfected i might drop it down to get some more speed out of it =]
RGB 5mm led
Saw these and they look arsome so i decided to use them as a led indicator for different states of the IR and the contact switch.
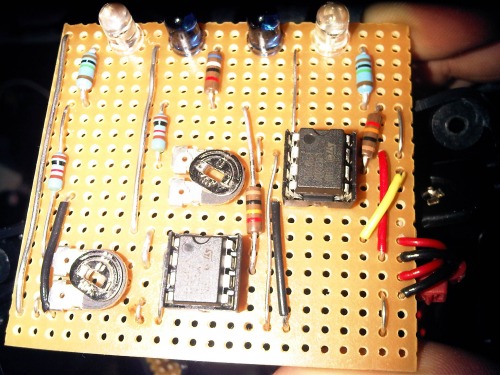
my prototype of the IR input, worked well and able to change the referance voltage for the comperitors.
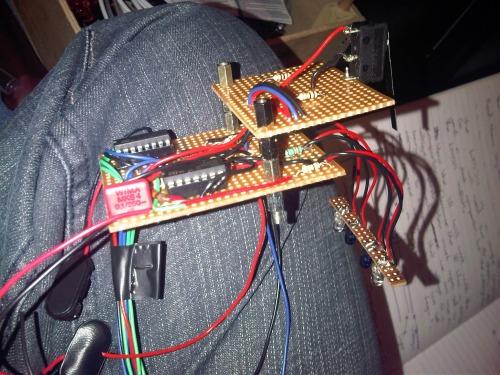
second layer with IR and the motor controller L293D and the contact swtich
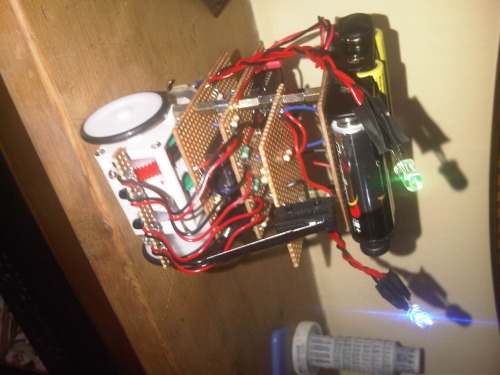
forgot to get any more pictures but here it is all together.
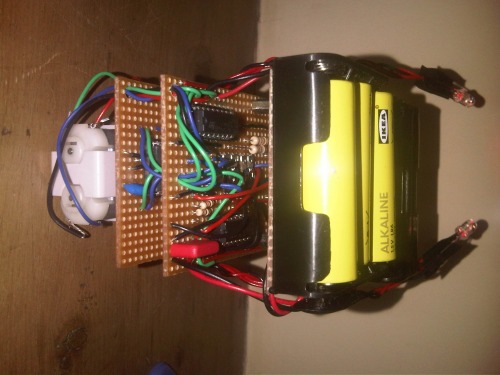

still need to do some slight changes to the algorithm but it’s a start.
navigate a line using IR
- Actuators / output devices: 2* 1.288 v3 motors
- Control method: All by itself
- CPU: Picaxe 40X2
- Operating system: Windows 7 x64
- Power source: 2* 4.5v + 3v
- Programming language: Picaxe basic
- Sensors / input devices: IR
- Target environment: indoor