



Mr. Sparkler - new video, burning down the house
Update 2010.06.11: New video for those who have birthday today
Ni hao robot builders,
Mr. Sparkler is a tank track robot. He drives around, waits from time to time to give it a sparkler. If you give the robot a sparkler, the robot hand catch it, move it to an implemented storm-proof lighter, light the sparkler off automatically, waves with the burning sparkler, plays music as well and throws the spent sparkler then away. In the end the opposite of a fire fighting robot :) Another idea would be to light off fire cracker...or to let the robot do simple chemical experiments.
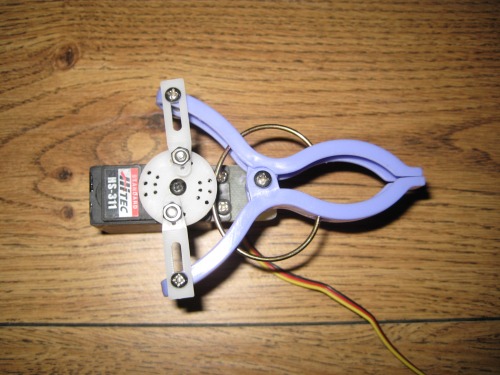
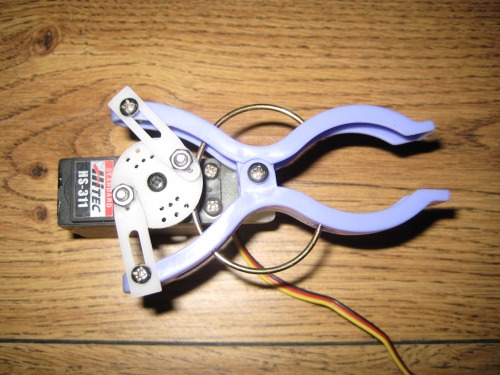
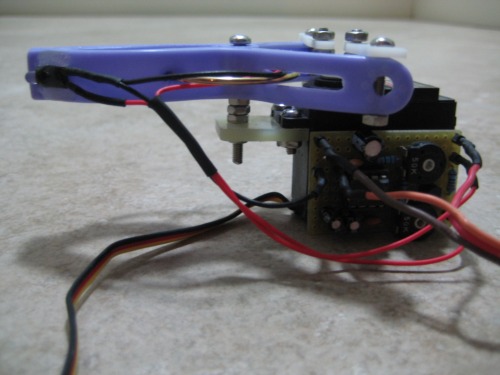
Decided to redo the design and give the robot a more humanoid outlooking. During I played with a clothespin, I had the idea for a simple and cheap but effective servo gripper:
Next step will be to add a reflection light barrier to trigger (open) the gripper if different objects get close to the gripper.
A simple reflection light barrier circuit is shown below:

The concept of the circuit is to send out IR light with a specific frequency and trigger only if the received light has exactly the same frequency. For this purpose the tone and frequency decoder chip NE/SE567 is used.
The reflection light barrier is broadly not influenced by the ambient light. It can only be problematic, if the ambient light has a frequency of 50 Hz or a multiple of 50 Hz, therefore the frequency can be adjusted with the potentiometer R5. The sensitivity can be adjusted with potentiometer R3. The range of the reflection light barrier is about 0 to 5 cm, depending on the reflection properties of the approaching obstacle.
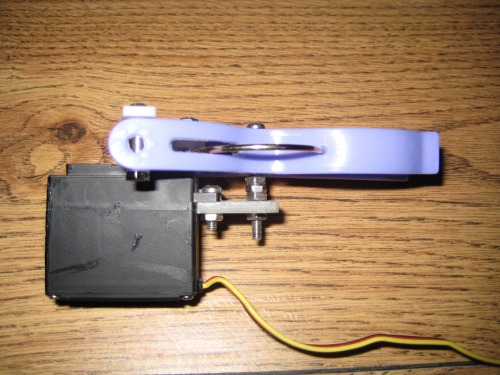
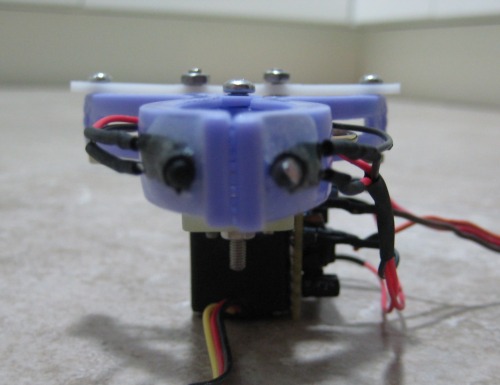
The gripper is now done:
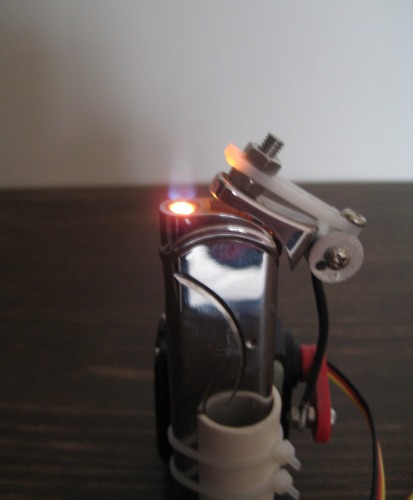
The lighter has been hacked successfully:
Navigate around via IR, light off sparklers, fire crackers or do simple chemical experiments
- Actuators / output devices: 2 gear motors for the tracks, 1 servo for IR, 3 servo robot arm, 1 servo to actuate lighter
- Control method: autonomous
- CPU: 2 x Picaxe 28X
- Operating system: windows XP
- Power source: 1 x 7.2 V 2000 mAh, 1 x 4.8 V 1000 mAh
- Programming language: Picaxe basic
- Sensors / input devices: Sharp IR, home-made bumper switch, light barrier, maybe temperature sensor DS18S20
- Target environment: outdoor