



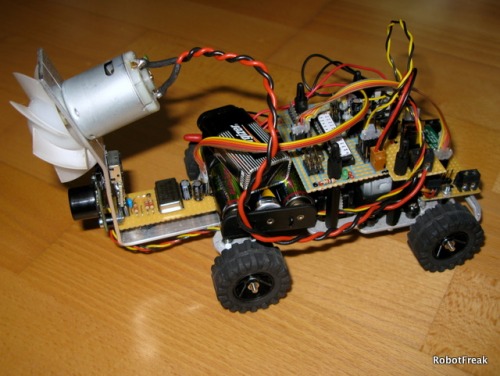
Mr. "Red" Adair - Firefighting robot
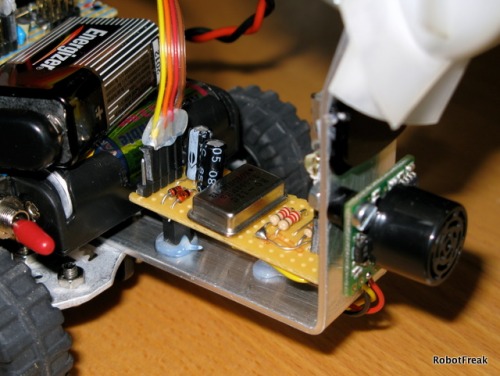
This is my competitor for the LMR DAGU contest. It is named Mr. "Red" Adair, named after the well known firefighter Paul "Red" Adair. An Atmel ATmega328 controller acts as brain together with a Pololu LVDSMC as motor controller. For the blower motor (robbed from a defect hair dryer) a simple logic level N-FET (IRL540N) has been used. The chassis is from a cheap RC car illumninated with red, white and blue LEDs. As power supply 3 AA cells for the drive motors are used. A 9V battery block has been used for the blower motor and the 5V regulated controller supply.
Update 05.07.2009:
Late, but hopefully not two late. The 2. Video shows Mr. Red Adair at his work. Not perfect, but I have no time to make it better. Thanks for all your votes. It was a great pleasure to take part of these contest.
Controllers:
- Atmel ATmega328 16Mhz with Arduino bootloader
- Pololu Low Voltage Dual Serial Motor Controller
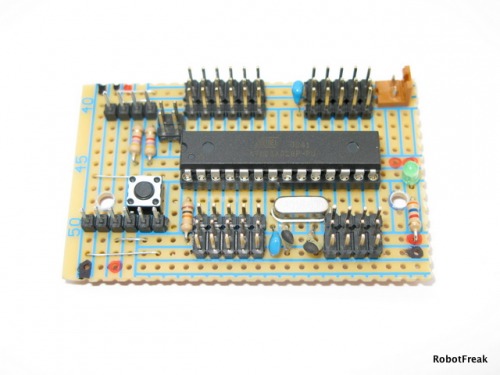
- Maxbotix EZ1 Ultrasound sensor
- Wii IR Camera as fire detector
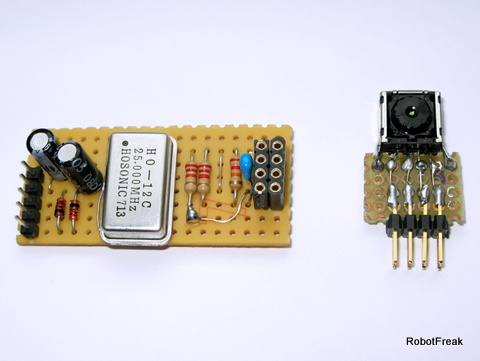
The Wii IR camera works fine for detecting a candle light, but not for all distances. Unfortunately when the robot stands directly (5..10cm) before a tea light he is blind and didn't detect the flame. I hope this will be fixed soon.
Actors:
- 2 Mr. Basic standard motors for differntial drive
- 1 DC Motor from a defect hair dryer as Blower motor. Controlled by a logic level N-FET.
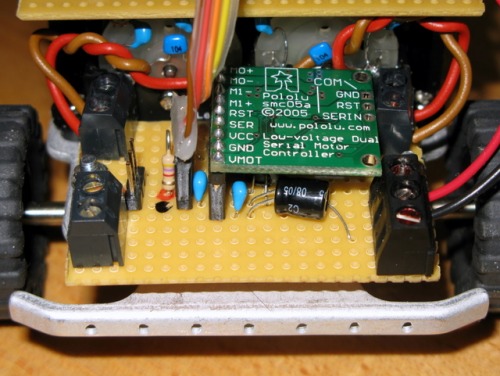
The Pololu motor controller needs some extra external components. Without some filter capacitors (100nF and 100µF) and a pullup resistor on the RESET line the motor controller hangs up when I try to strat the otors turning.
ToDo List:
- Improvement of fire detection
- additional collision detectors
Navigate around via ultrasound. Detects fire and fight against it.
- CPU: Atmel ATmega328
- Power source: 3 AA cells, 9VDC battery for 5VDC regulated supply
- Programming language: Arduino
- Sensors / input devices: Maxbotix EZ1, Wii IR camera
- Target environment: indoor flat surfaces