



Mr. Radioactivity
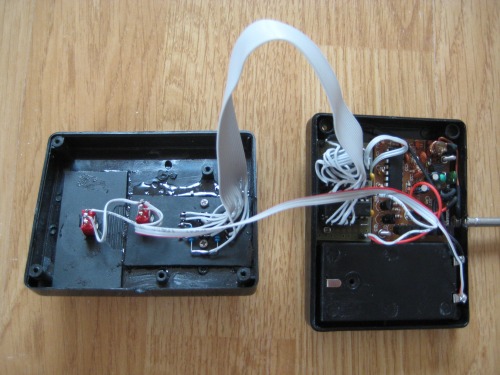
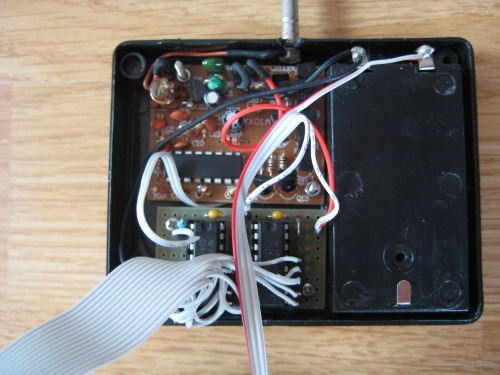
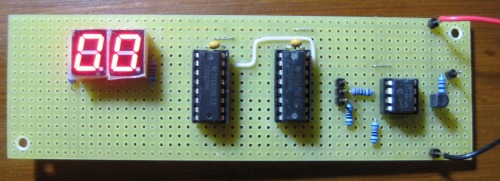
Hi everybody! Finally I found the time to start building Mr. Radioactivity. The robot navigates around via Sharp and tactile sensor, measures ionizing radiation via Geiger-Mueller tube and according circuit and sends the registered impules wireless to a 2 digit 7-segment counter. The RX/TX unit is from an old RC toy car. I removed the TX PCB from the transmitter case and placed the RX PCB as well as a small perfboard with two 4026 decade counter and 7-segment display driver in it (You can find the circuit diagram in the attachment):
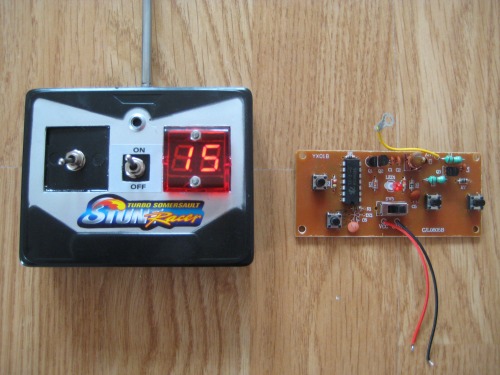
The red transparent press button of the original transmitter case is now used as a cover for the 2 digit 7-segment displays:
Beside the wireless counter, the impulses will be ascertained by a Picaxe 08-M. If the nucleus decays per second exceed a defined level, the robot stops and emits an alarm sound.
I will use the 712 End Window-Alpha-Beta-Gamma Detector from Sparkfun as well as the circuit diagram mentioned here.
If the Sharp GP2D120 IR sensor detects an obstacle in an unacceptable range, the robot starts an evasive maneuver. The decision whether the robot turns left or right is random. If the number of registered nucleus decays, stored in a variable, at the moment of the obstacle detection is even, the robot turns left, if it is odd, the robot turns right.
I have written a short but effective test program for obstacle avoidance, using pseudo-random numbers (random command). Now I have to build the Geiger counter, unfortunately my Sparkfun order has following status since one week:
![]()
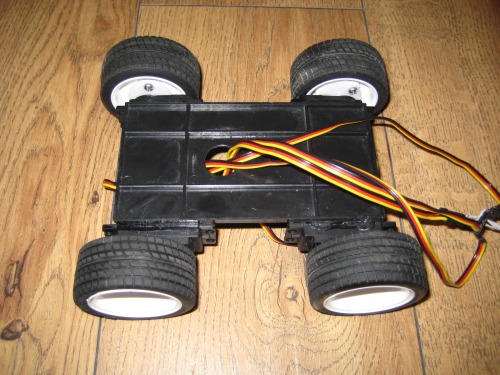
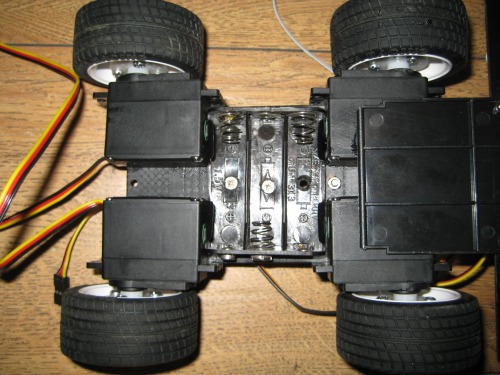
2010.05.26 My Sparkfun order has still the same status. I did some re-design and built a 4 wheeled (56 mm dia. TAMIYA) platform with 4 continues rotating servos which is more all terrain like:
2010.05.28 Some more progress on the new platform...
Tactile sensor, servo for IR and servo driver:
Battery case for MCU:
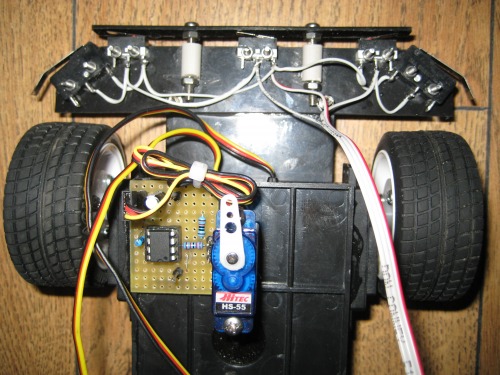
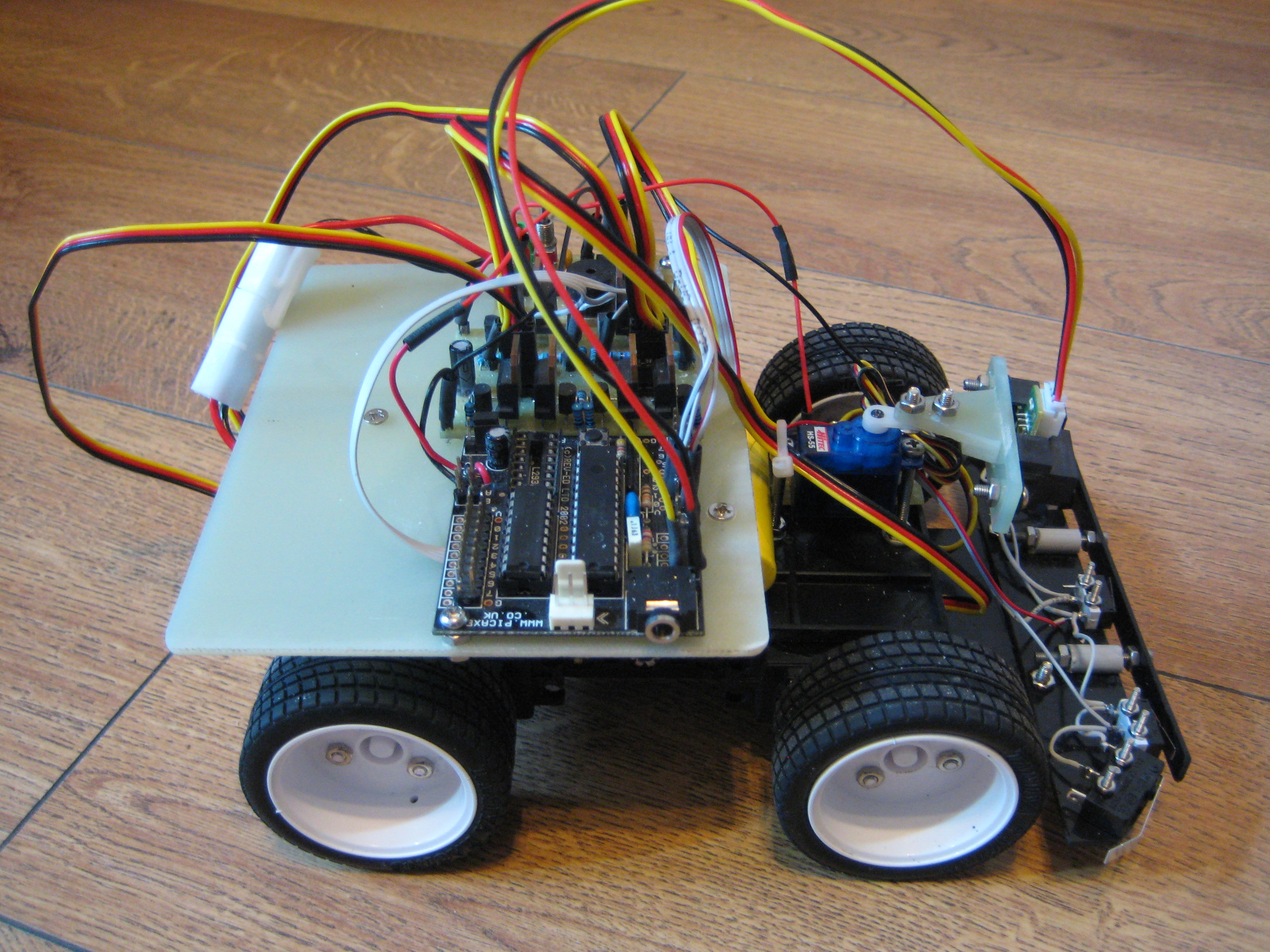
2010.05.29 Picaxe project board, H-bridge, voltage regulator board, Sharp IR mounted and test drive passed:
2010.05.29 High voltage generator for GM tube built and tested:
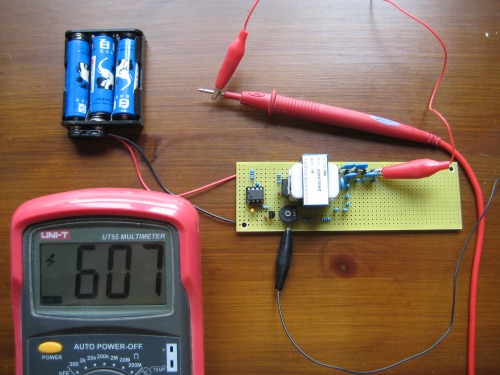
The circuit just draw 10 mA @ 5 V.
2010.06.10 I am still fighting with the Chinese customs to get my Geiger Mueller tube...Decided to mount the 2-digit 7 segment display counter on the robot. The two 7 segment displays show now directly the decays per second. Two CMOS 4026B control the 7 segment display. A Picaxe 08M evaluates the incoming pulses per second by the count command and clock/reset the CMOS 4026B accordingly. I have attached the circuit diagram and test code.
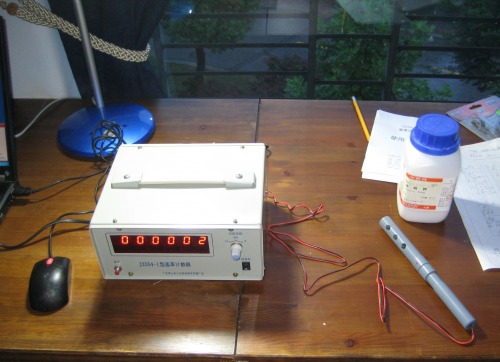
2010.06.14 Purchased a cheap Chinese Geiger counter from taobao to check and calibrate my hombrew one. The counter is very sensitive (about 50 cpm) for β and γ. A test with KNO3 (isotopes of potassium are radioactive) shows an increase of around 3 bq.
2010.06.26 My father handed on a MR 9511 Geiger counter to me during my visit in Germany. As I opened the Geiger counter to change the battery I found that the MR 9511 has the same 712 End Window-Alpha-Beta-Gamma Detector which I recently ordered at Sparkfun and which is still in the Chinese customs. The MR 9511 has a 3.5 mm analoque output socket and the data sheet (in German) can be found here.


Tomorrow I will check some phosphate rocks and other uranium containing mineral.
TBC
Navigates around via Sharp and tactile sensor, measures ionizing radiation, telemetry of radioactive activity via wireless 2 digit counter
- Actuators / output devices: beeper, LED, 1 servo for IR, 7 segment display, 4 continues rotating servos
- Control method: autonomous
- CPU: Picaxe 28X / 08-M
- Power source: 7.2 V / 700 mAh NiCd
- Programming language: Picaxe basic
- Sensors / input devices: Sharp IR, tactile sensor, Geiger counter
- Target environment: indoor, easy outdoor