



Mr. Cheese Can
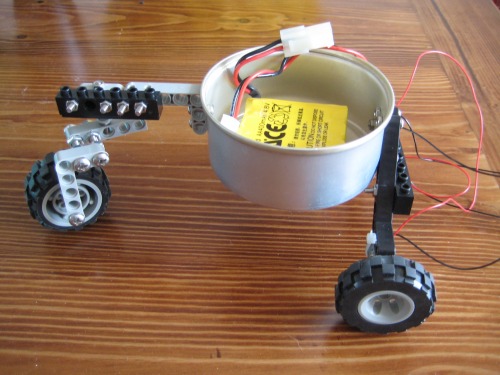
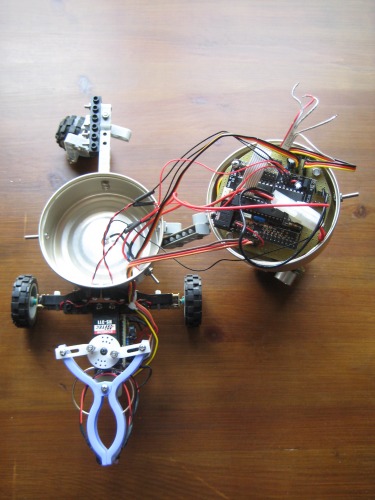
You can buy German Cheese in Shanghai, sealed in a nice aluminum can. Since a while I toyed already with the idea of doing sth. with these cans. Too good to throw away. I also had some parts and wheels from a Chinese LEGO clone called Ban Bao as well as two micro gear motors around, so I started to build a 3-wheeled light robot platform.
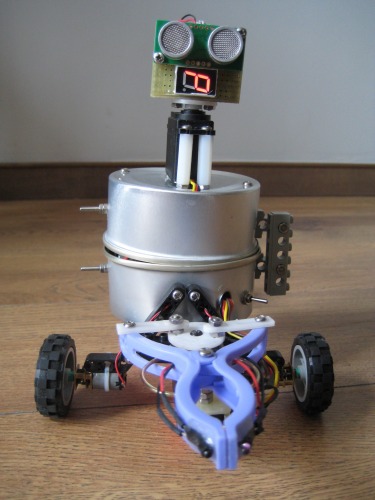
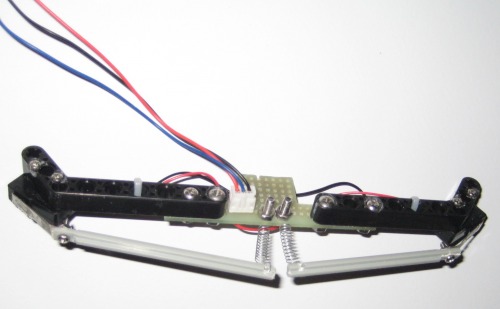
Using my clothespin gripper...

... and a lying 7-segment display below the SRF05, the robot takes shape:
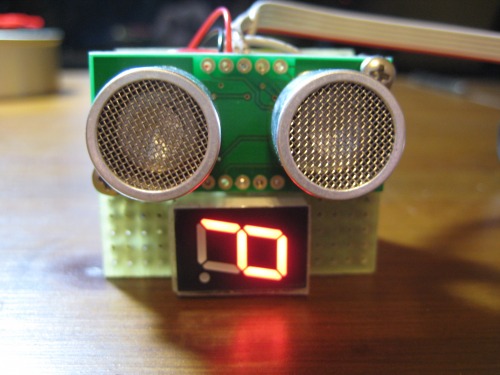
The control of the 7-segment display is similar like for Mr. Sunsmile with a diode matrix, a CMOS decade counter/divider 4017 and a Picaxe 08-M. The robot [head] can express following moods:
:D
:)
:(
:|
:P
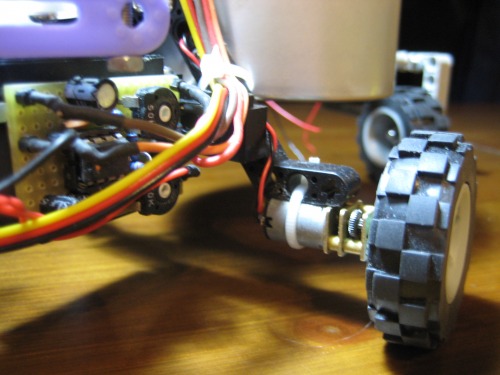
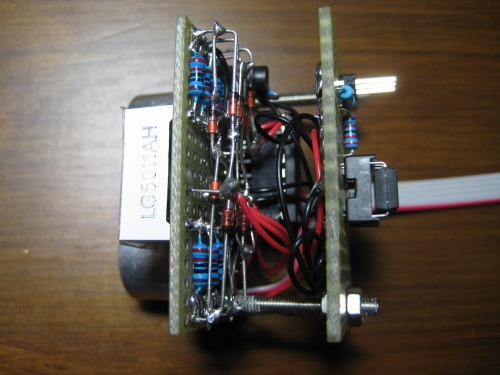
A close-up of the interior of the robot head:
TBC
2010/4/26: Had time in the fast train to draw some circuit diagrams. Attached you find the 7-seg control unit and the reflection light barrier, which I am using to trigger the gripper.
2010/4/30: Open up mechanism:
And closed:
Home-built tactile sensor:
2010/5/1: Mr. Cheese Can is so far finished, now I have to program him.
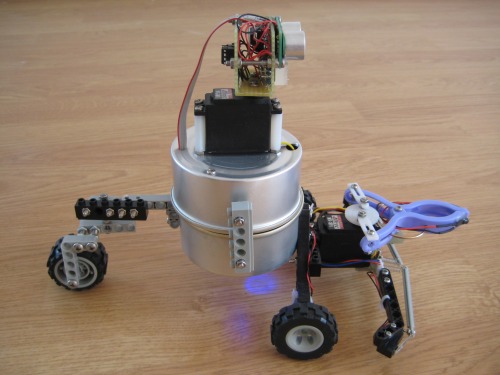
Navigates around via ultrasound, makes :D :) :( :| or :P, tries to catch everything nearby with its gripper
- Actuators / output devices: 2 gear motors, 1 servo for srf05, 1 servo for gripper, 7-segment display
- Control method: autonomous
- CPU: Picaxe 28x1 and Picaxe 08-M
- Power source: 4.8V 700 mAh NiCd
- Programming language: Picaxe basic
- Sensors / input devices: SRF05 Ultra Sound, bumper switches, IR sensor for gripper
- Target environment: indoor