



Mouse
Hello everybody, Here is my last robot. The first one I post on LMR. I've been on LMR for quite a long time but never really posted anything. So it's time to start!
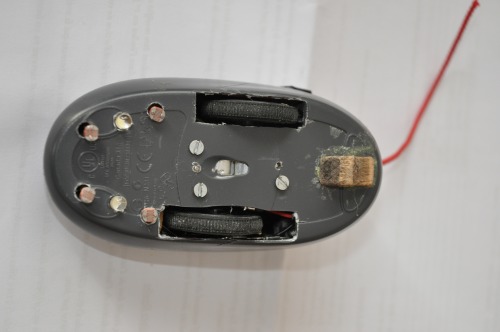
This robot is a line follower; I wanted to make a bot based on a computer mouse, but didn't want the wheels out of the body. And I also wanted the bot to do something and no just ride randomly. This was quite challenging but I did it I'm quite happy with the bot!
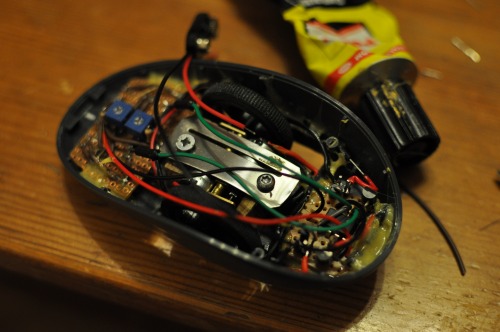
The electronic is really simple : a comparator chip drives left or right motor through a transistor according to the difference of light seen by the left and right pairs of LDR. Only one motoris working at a time. The "led eyes" a mounted in parallel with the motor one eye for each motor.
There are two potentiometers that you can reach trough the hole on the front of the mouse : one is for the white leds brightness and the other one is for adjusting the sensors.
The schematics I used is largely inspired by the one you can find in David Cook's excellent book "Robot building for beginners". The robot described in the book is called "Sandwich" and you can find some pictures and infos on the author's website : www.robotroom.com . I also highly recommend his other book "Intermediate robot building" which is even better.
I had some problems with the speed : robot was too fast to follow the line so I just added a few diodes in series with each motor to drop the voltage.
The bot is considered as finished even if it still lacks a power switch which makes it a bit difficut to start. Maybe I do this in the next couple of days.

Follows a dark line
- Actuators / output devices: 1:50 micro motors from pololu
- Control method: autonomous
- Power source: 9v battery
- Sensors / input devices: 2 pairs of LDR
- Target environment: indoor