


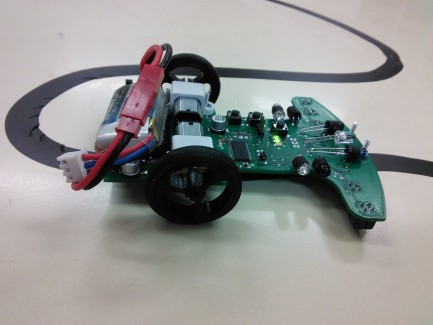
motoko reloaded - msp430 neural network line follower
line follower using two linear neurons (controllers) PD for differential and I for speed; both with antiwindup, error filtering and simulated annealing tunning (take about 80 loops in short testing line loop); second controll stage is curve predictor - table of curves to prevent overshoot (still present)
line follower
- Actuators / output devices: DC Motors, pololu
- Control method: modified pid with curve predictor, simulated annealing learning
- CPU: msp430f2232
- Operating system: none
- Power source: 2S lipol 250mAh / 400mAh
- Programming language: C, ruby
- Sensors / input devices: accelerometer, gyro, 8x cny70, 3x ir
- Target environment: indoor