


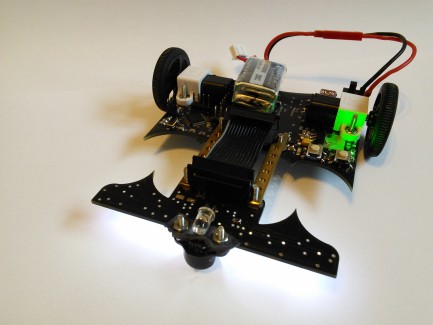
motoko aftermath line follower
line following robot; running on 72MHz ARM Cortex M4, stm32f303 (pin compatibile with stm32f103); as controll loop pid is used for basic position control; for high level control mechanism, kohonen neural network and ilc is used;
more on my blog http://aikenshin.blogspot.sk/
sources availible on https://github.com/michalnand/
line follower