


mop robot for the wifey :]
to view all the posts i did on this robot, please check my g+ profile, https://plus.google.com/+jeromeianbuhisan/posts
my original intention was to build a line follower robot, until my wife's household chore caught my attention. from then my focus was on creating a robot similar to roomba, minus the vacuum. :]
the original design was a bit of a bulky wiring, but it worked well, running only on a single 9V battery to power the arduino uno, motor shield, and an ir sensor. then i read through some posts that this was a bad idea, and the mop section also got gave up after bumping several times at high speeds. https://lh5.googleusercontent.com/-FUxbiSl3Mt4/U5vai8JJwlI/AAAAAAAAAY8/SJIKIWd5hVk/w668-h501-no/mop_robot_mark_1.jpg
the 2nd design had a flaw which i didn't think through. i placed all components on top of a flat plastic plate which meant that there was more surface area in contact with the ground. this meant more force from the motors to move it. failed. https://lh3.googleusercontent.com/-sxIPzdlK1Qg/U5valK677PI/AAAAAAAAAZI/9lis3DfKTqU/w760-h501-no/mop_robot_mark_2.png
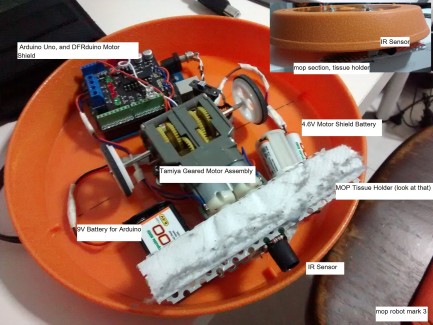
the final design, came from looking at most cleaning robots like roomba. almost all designs were round, and a trip to a 2$ store gave me an idea when i saw this plant pot, which gave me a lot of advantages:
(1)spreading out the components, and attaching them to the underside of the plate to distribute the weight of the components (2)attaching the components that way, provides me an option to limit the surface contact to the 2wheels, and the mop. (3)giving a chance to hide messy wiring..hehe
basically, the logic for the mop robot is; check analog in, if it exceeds limit (onstacle) stop motors, turn right, stop motors else move forward, and increment forward count,
todo: (1)add an antenna which serves as a sensor for situations where it goes under the bed. (but then again, under the bed is a good amount of dust and dirt to pickup). (2)improve the obstruction sensor, maybe add a ping component.
navigate around using infrared sensor for obstruction detection, and push a piece of tissue around the room, collect dust, hair and dirt.