


MoBot V1.01
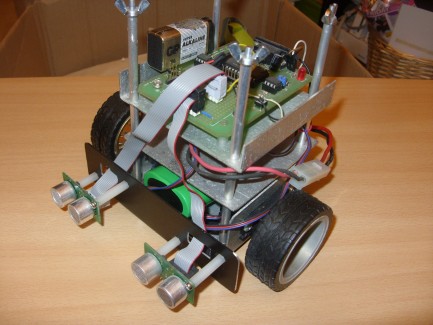
removed rear caster and inverted the chassis, this let me use the base to mount a 3000ma 7.2v racing pack to provide power for the servos. electronics are unchanged it is still using a Basic Stamp 2, It now uses 2 Daventech SRF-04 ultrasonic sensor, for collision avoidence, although im still trying to get them both to work together, i think the problem is my controller board is not suppling enough current to power both SRF-04's at the same time.
- Actuators / output devices: 2 x Futaba modified Servos
- Control method: autonomous
- CPU: Basic Stamp 2
- Power source: 7, one 9V battery for MCU, 2V 3000mAh NiMh battery pack
- Programming language: Basic
- Sensors / input devices: 2 x SRF04
- Target environment: indoor