


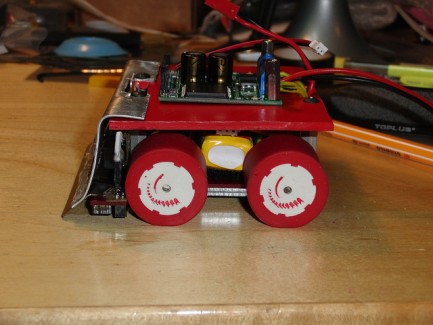
Mini sumo robot
My first mini sumo robot:
- Fingertech "Cobra" mini sumo chassis
- Motor driver: Pololu item #:708
- IR sensors: GP2Y0D340K GP2Y0D310K
- Microcontroller: ATmega328p
Links (spanish):
Mini Sumo
- Actuators / output devices: 4 x 20:1 Spark Gearmotors
- Control method: autonomus robot
- CPU: ATmega328P
- Power source: Motors: 7.4v lipo. Electronics: 3.7V + dc-dc
- Programming language: C
- Sensors / input devices: IR: 2 x GP2Y0D340K + GP2Y0D310K
- Target environment: indoor