


Mini-Sumo
Let me show you my latest bot. He was made using the Mini-Sumo class rules. A complete rundown on the rules can be found HERE. I strayed a bit from them as I use a ring that is white inside with a black ring. This was printed at
work and I made the color change to save ink.
Update 5/31/2010:
With some help from Patrick McCabe, we got the code written to get the robot working. In the first video the bot wanted to always turn instead of travelling in a straight line. One drive motor was running at a slower rpm. I replaced the motor with an identical one and now it goes straight. I still have a few software details to work on:
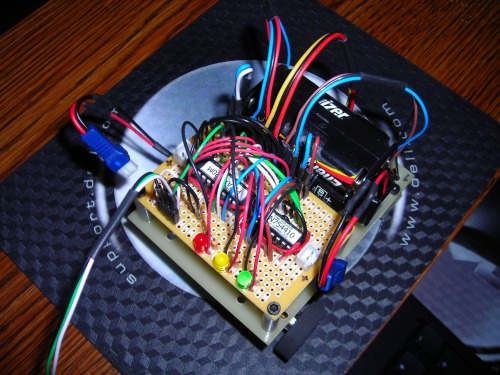
1.) I think the edge sensors are looking thru the paper and sensing the seams in the floor as the bot reverses when it does not have to. The Red and Green LED's flash anytime the corresponding edge sensors see black. Probably have to increase the ADC read number.
2.) See if I can tweak the Sharp sensor into seeing better. It misses a few good opportunities to push out the cup in the video.
Overall I am pleased with how this bot turned out and am looking at doing some upgrades. The Picaxe 20m chip is almost out of memory so a Picaxe 20x2 will be ordered first.
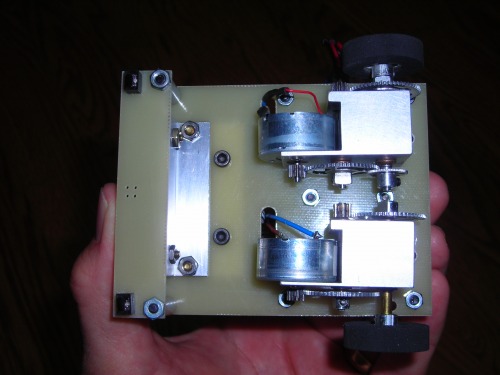
The chassis is made from .062 [1.6mm] thick linen/epoxy phenolic. Really like this material as it is flat, cuts great
and is strong. The Rules say 100 x 100mm max size. Mine finished at 92 x 98mm. I have some wider tires that would
increase the size to 98mm square but I doubt this bot will ever compete as there are no robot clubs anywhere close.
Weight is 12.7 oz. or 360 gms. That is light, as the rules say 500gm max. I could easily add 140 gms of weight on
the sides but I won't have a need to. Maybe I will make another someday so I can watch them battle.
The gearboxes are made by me. I stole one from an earlier bot, LineFollower, that did not work out so well and
made a clone of it for this robot. Gears, axles and tires all came from the slotcar world, motors are from discarded
computer CD drives. The gears are 64 pitch teeth and the axles are 0.094" [2.38mm] in diameter. These motors run
fine at 3.5 to 5vdc.
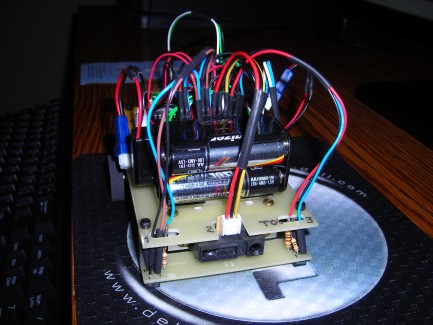
I have 3x1.2v rechargeable batteries powering the electronics, sensors and LED,s. The motors get 4x1.5v batteries
with about 4.5v to power them. A trip to Radio Shack got me the circuit board, #276-150. The processor is a
Picaxe 20m. It's a bit short on memory but a more powerful chip, the 20x2, is a plug-in replacement needing just
some code mods to work.
Motor driver is a TI #SN754410 chip. I used this model instead of a L293D because it was found first in my
chip box. I like plug-in wires so everything needing external connections are made with female headers soldered to
the circuit board and male headers on the motor and sensor wires. The 3-pin male headers on the board are for my
programmer cable.
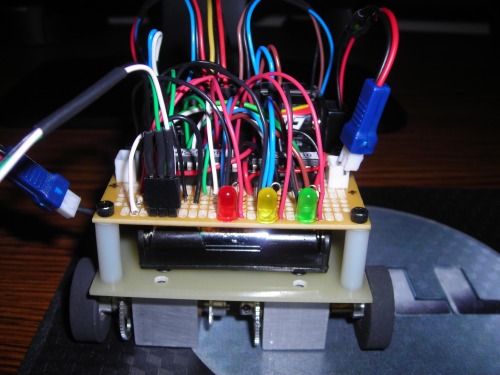
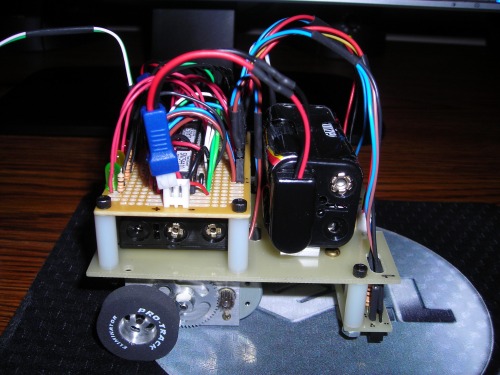
3-LED's count down the 5-second start time. Edge line sensors (2) are the Fairchild #QRD1113 IR photoeyes and a
Sharp #GP2D120 looks for anything inside the ring.
As the video shows, I have not got the Sharp programmed yet, so the bot just stays in the ring for now. I will add
more video when I get that part working.
Thanks for looking at my Mini!
It would compete in a Mini-Sumo class contest and push opponent out of ring
- Actuators / output devices: 2-5vdc computer CD drive motors
- Control method: Full autonomous
- CPU: Picaxe 20M
- Operating system: windows XP
- Power source: 3x1.2vdc rechargable electronics, 4x1.5vdc batteries motors
- Programming language: Picaxe basic
- Sensors / input devices: Sharp GP2D120 IR sensor, 2- IR -#QRD1113 optical sensors
- Target environment: Inside a mini-sumo ring