



Mini R2D2
A while back I stumbled upon a couple of plastic spheres sizes 16cm and 4cm in diameter. The spheres came in separate halves, making them ideal for a small robot project. So after 2 years of hardly touching anything robot, aside from a few minor modifications to my previous creations, I've decided to take on a more ambitious project. This time I set out to fullfill a promise I made to myself about 30 years ago and the same promise I made to my four year old son last year: I will build an R2D2!
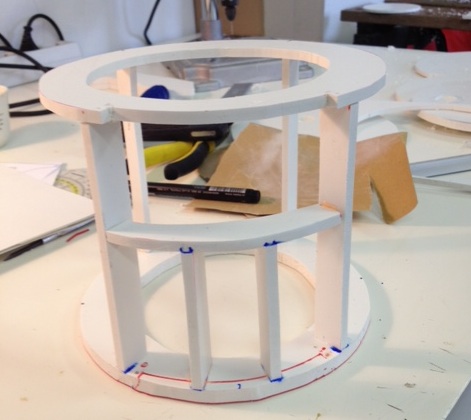
Because the dome is a fixed size, all other sizes have been derived from that. This robot will stand about 35cm tall and, being build from expanded PVC, it will not weigh all that much. That size will be enough to place a few distance sensors in the feet. It will have a rotating dome with lights, sound effects and a automatically retractable third leg. Other stuff such as moving arms and periscopes and stuff like that will be left out (at least for now)
I will maintain several blog posts for the different sub-projects:


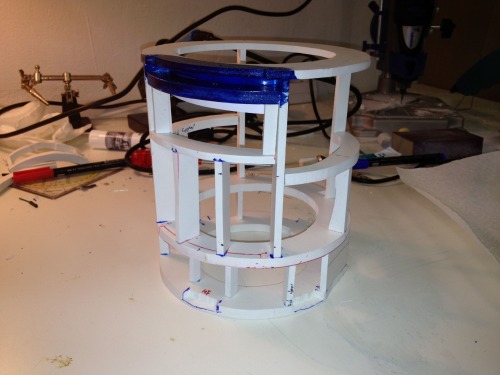
Update: Lights and motor are added to the Dome. still needs proper mounting of the motor and lights for the front eye. The PVC tube center axle works well.
Update May 13th 2012: The extra bright LEDS for the front eye came in last week. They look okay and hopefully they are bright enough to be visible through the white paper circle. Did the first test fitting of the skins and that looks good. The silver colored hub needs work though, it is not thick enough to hide its edged behind the skin. See the detail blog pages: Body and Legs.


Work on the electronics and the programming have also started. This robot will probably use a picaxe 40x2 RaspberryPi Model-A as a brain. My 20X2 board will be enough to control the dome functions. The electronics for the legs will only be able to change from two legged upright position to three legged moving position and back. As it looks now, those will be added last so I'll decide on the controler when the mechanics are functional.
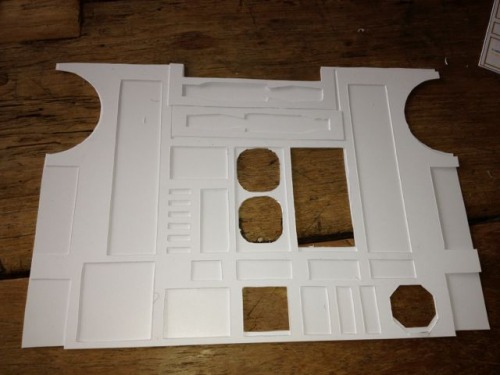
update june 1st 2012: Painting the skins is done and I am satisfied with the results. Now the silver and blue details will have to finish the looks. I'm looking forward to adding all the panels and vents.
Update july 15th 2013: Lots of work on the feet and electronics. Dome has been improved a lot.
Update july 28th 2013: Build the lifting structure for the third leg. Started making the second foot. Made the skirt and attached it to the bottom. Added first draft of front vents where an SRF02 will be hiding behind. fitted everything together for update pictures.


Drive around, beep, blink and look good
- Actuators / output devices: none yet, lots planned
- CPU: Picaxe 20x2, Raspberry Pi
- Power source: 9.6V or 12V NiMH from 8 penlites
- Programming language: Picaxe basic, C
- Sensors / input devices: TBD
- Target environment: indoor