


Mini mobile platform
Hi, its my first robot project posted on this site. It's mobile platform intended to improvement. At first, few things about mechanics:
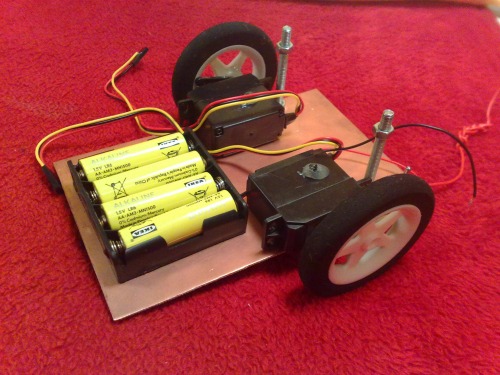
motors: 2 es-030 Servos modified for continous rotation, with steering method left
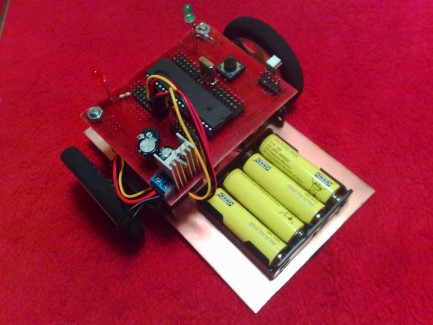
chassis: lower plate (pcb material, i don't know how it is in english :<), with batteries and servos glued with double adhesive tape and screws mounted for holding pcb in upper level. It also has a little slider glued do the second side of the chassis. Wheels are from my local modelshop, those are intended for rc flying vehicles, but they can be used for robotics. The tire is made of some kind of foam.
power supply: 4 AA batteries for servos, and one 9V battery + 7805 to power up electronics.
Electronics:
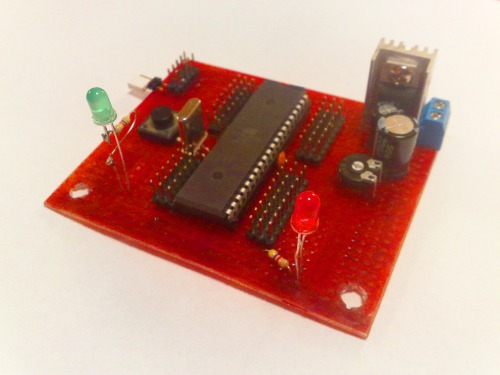
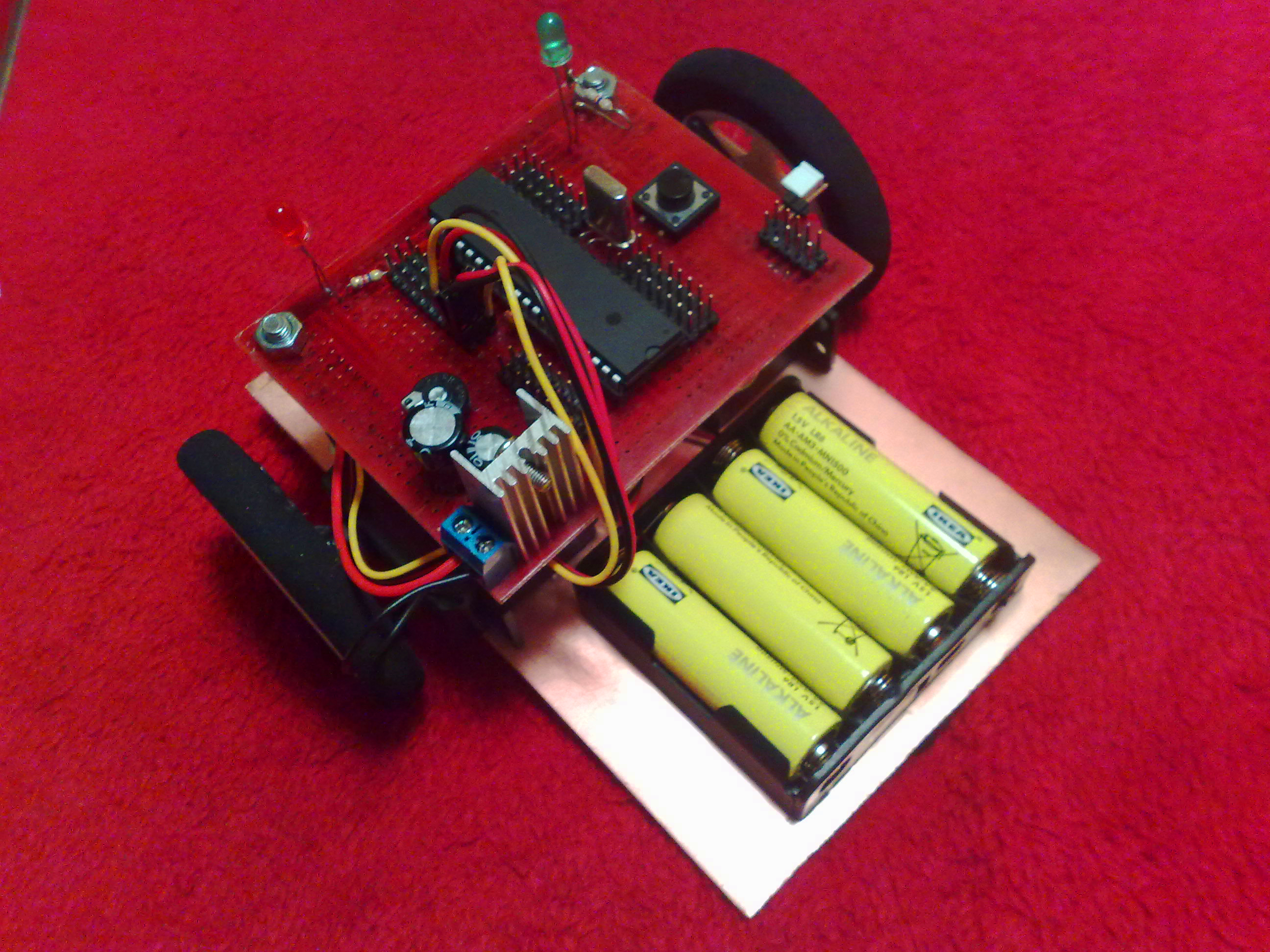
uC is M16@16Mhz with bootloader, with all I/O on golpins. Goldpins are set up in rows for easy sensor-and-servo mounting (GND, VCC, I/O). On pcb are several components easing work with this mainboard, such as 7805 sbilizer, rest button, Supply indicators, Potentiometer connected to aref, isp header, crystal, etc.
Ending, i want say that I'm going to buy/build some obstacle sensors (such as Sharp, tsop + ir, or something mounted on another servo.), add an LCD, add few line sensors,and I've already finished my arm, but i don't know if i'm using it in this robot.
PS. Sorry for my english, i'm from li'l country in central europe called Poland ;P
Nothing interiesting YET
- Actuators / output devices: Two servos modified for continuous rotation
- Control method: Autonomus
- CPU: atmega16 16PU@16mhz
- Power source: 4 AA batteries for motors + 9V battery and 7805 for electronics
- Programming language: Bascom Basic
- Sensors / input devices: Thinking of sharp, line sensors etc - the most common sensors.
- Target environment: Indoors. Carpet or smooth floors