



Mini Machine!
Well I've started work on a new robot, with size in mind. It's setup is somewhat similar to the "start here" bot, but it's actually got a chassis and something to cover up the electronics. Hopefully the only wires we'll see on this bot is the wires from the Sharp sensor. (This info is now out of date: I can now reveal the chassis is transparent, so we can look at the guts!)
I haven't actually got the parts yet, but I've designed it and made a Cad:
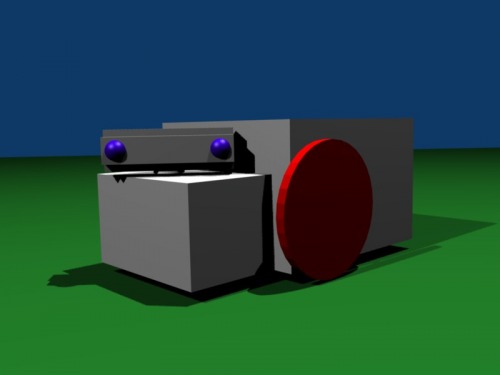
Yes, the Sharp sensor DOESN'T look like that, but I couldn't be bothered to model everything exactly and make them the right colours. And yes, it's NOT going to be a dull grey, it's going to be plywood (now I can tell it's transparent acrylic). And yes, the wheels DON'T look like that, they actually have spokes (I'm too lazy), etc etc.
Well, it is quite a midget, measuring less (now a millimetre more)than 10cm long, but when I was designing it I forgot to leave space for batteries, so instead of using 4 AA batteries, I'm gonna have squish in a 9V for the motors. This is not good for two reasons:
- Those little 9V batteries don't last that long
- Those little motors are gonna go WAY too fast, and they'll sizzle, so I'll have to use PWM.
Those little motors are Solarbotic's right angle drive GM7s. Although I haven't (now I have) seen them with my own eyes, from the datasheet and technical specifications I really like them, they are really small and and their dimensions are perfect for robot building, because of the way you can simply put them against the side wall of your bot: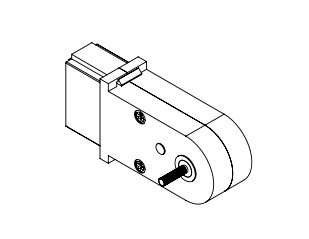
Of course, if your robot doesn't even have a side wall, like the "start here" bot, and many other chassisless bots, this motor is actually very bad.
Pictures:

General view of the bot

The guts! (without PCB as it's not made yet) sorry for the blur, my camera auto-focus get's confused by the transparent acrylic
Updates:
2009/02/ 8
I've finished the Cad, now I will start building the chassis.
2009/03/10
Now I've done a cool, transparent, orange, acrylic chassis! I know it's been almost a month since I updated this, but I was having problems with getting the chassis made, as the laser-cutter is at school. At least I've got all the parts now.
Almost all mechanical and structural details of the robot have been finished, now all I have to do is figure out how to make a printed circuit board and program the thing...
Images coming soon! (ie. once the camera's batteries have recharged)
Navigate
- Actuators / output devices: 2 x Geared motors, 1 x Micro servo
- Control method: Microcontroller
- CPU: AVR ATtiny26
- Operating system: Ubuntu (Linux)
- Power source: 2 x 9V
- Programming language: C
- Sensors / input devices: Sharp IR sensor GP2D120
- Target environment: indoor