



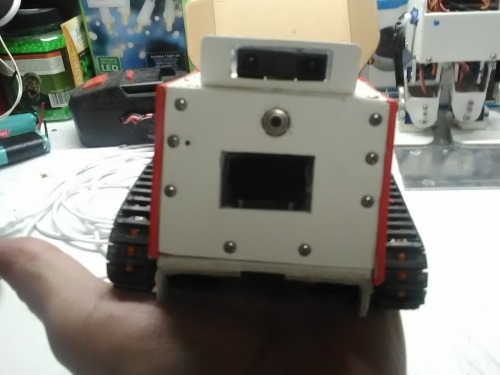
MicroBot OG Pronounced Oh Gee
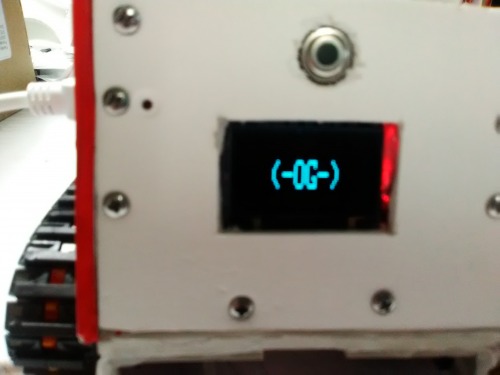
Microbot is my attempt to build the smallest tracked bot that I could using an Arduino Nano and Sensor Shield. It has a 128x64 Oled mono screen that displays a face and messages based on the reaction. I amusing a touch less temperature sensor and Sharp IR distance sensor together to detect the presence of a person. When the bot is first powered on it goes through a seek and looks for a temperature above 80 F. Once this is found it then follows that heat source at a given distance. If you hold you hand it will only come so close and if you put your hand closer to the bot it will back up. This is all based on the temperature and distance to the object. If the temperature falls below 80 F it then stops and goes into the search mode again until it is found. After several attempts of search if it does not find the heat source it will stop and go into a rest mode. If the heat source (your hand) is placed in front of it for a second it will detect that and wake up and begin searching and following. If the bot reaches the edge of a table it will backup as it has a IR sensor on the bottom checking the distance.
UPDATE 3/18/18:
I have added the ability for it to roam around autonomously. After it has not detected the presence of a temperature above 80F it then goes in autonomous mode roaming around. During this time if it detects a temperature above 80F it then goes right back into following that object/person. If you get too close to it, it backs up and as you move away fm it, it moves forward and follows.
Microbot is 4" wide x 5" long x 4" tall.
Update 3/28/2018:
Microbot now has an official name "OG"






Update 3/30/2018:
I received my new Oled screen and it work great.
I installed the new screen and also designed a single transistor amplifier for the .5 inch speaker that is now installed.
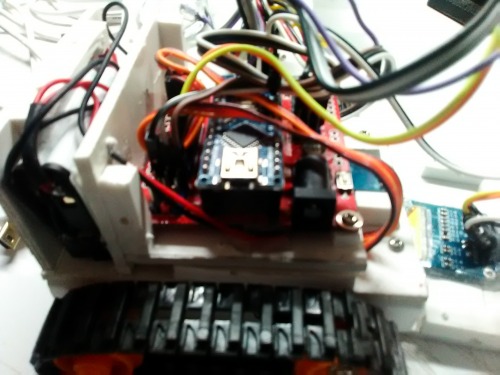
The wires inside of OG all need to be shorter so I spent a hour shortening the wires and cleaning up the inside.
Below are some pictures before the wires were shortened and the new screen added.


Here are the after pictures.



Currently I am working on an IR Beacon that OG will be using.
I am also working on adding the ability to use a IR remote to change the temperature that he detects and change modes.
Using Temperature and Distance finds a person
- Actuators / output devices: Continous modded micro 9g servos
- Control method: autonomous
- CPU: Arduino
- Programming language: Arduino
- Sensors / input devices: SHARP IR sensor, IR sensor