



Megus
Forgive my poor english..
Many thanks to LMR and special thanks to BIRDMUN , ANTONIO.CACIUC,BASILE and peter ROBOTFREAK
This is my first robot that is capable of solving maze(i havn't built any maze yet)
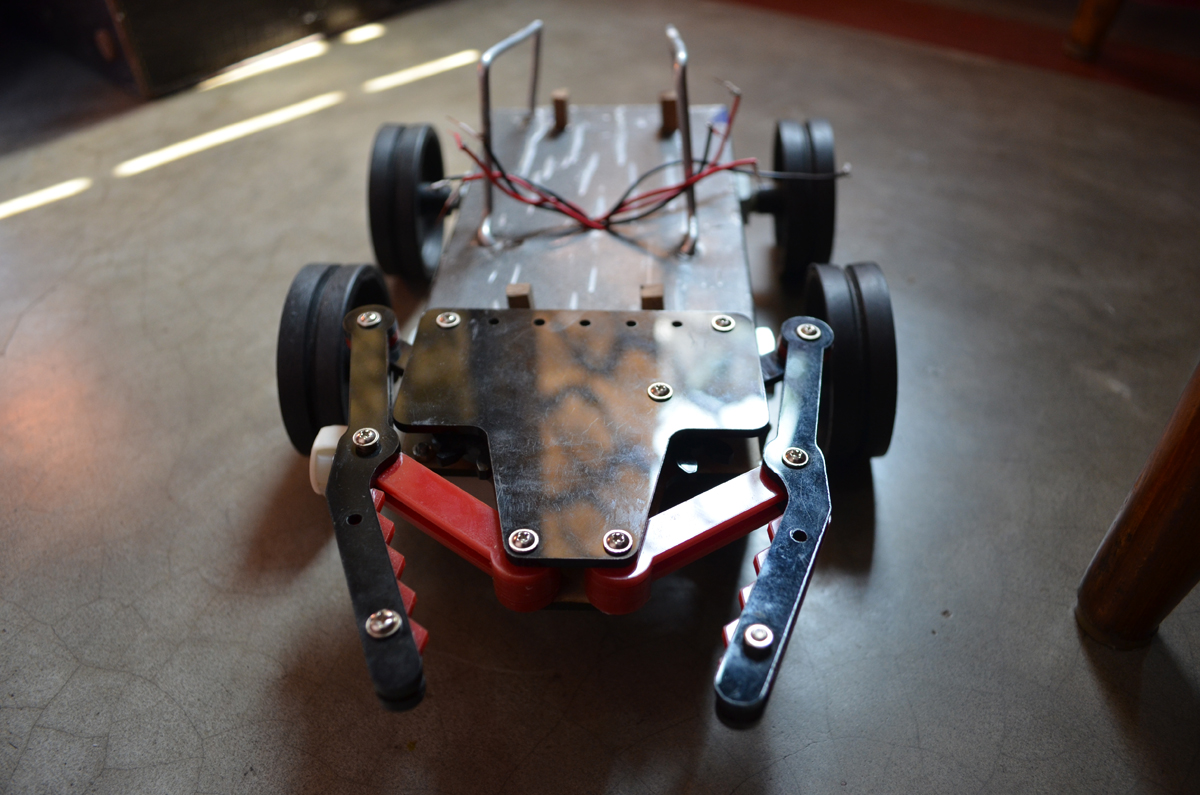
this is the begaining
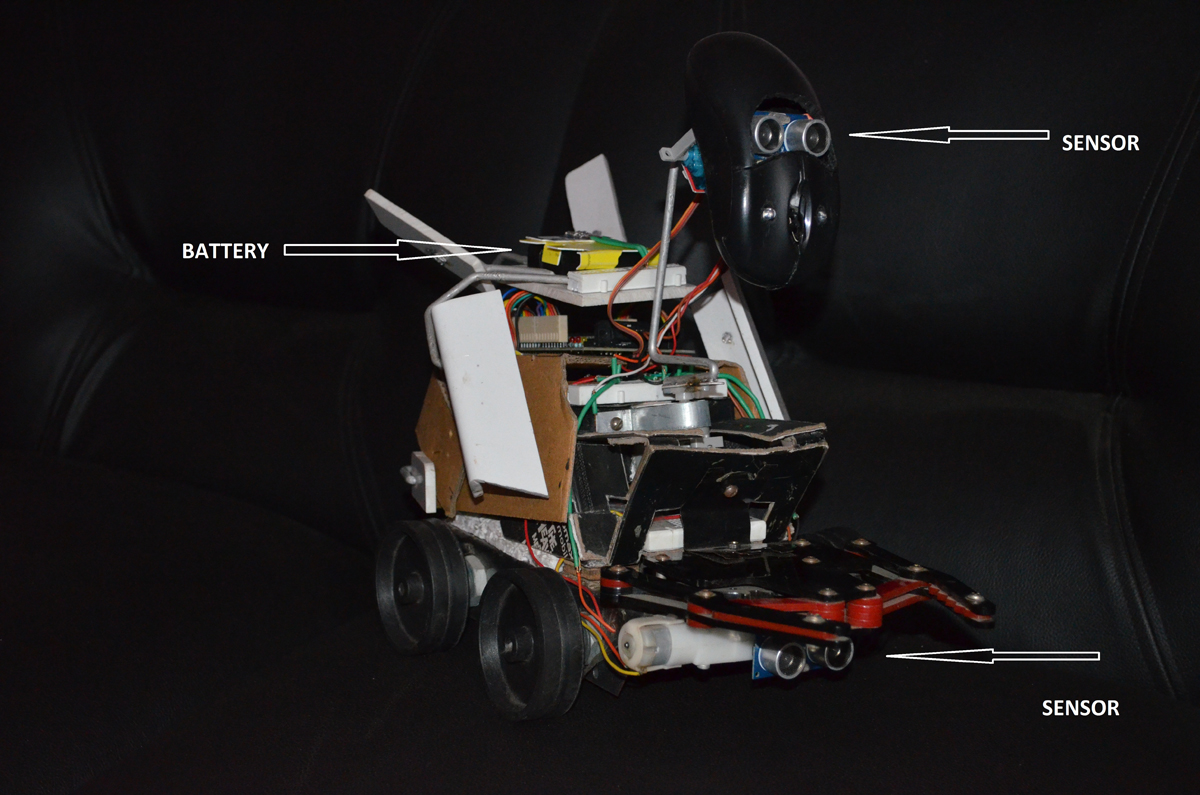
The Face..(I know the cuttings are not perfect.I cut it with a soldering iron.)

The Shell..

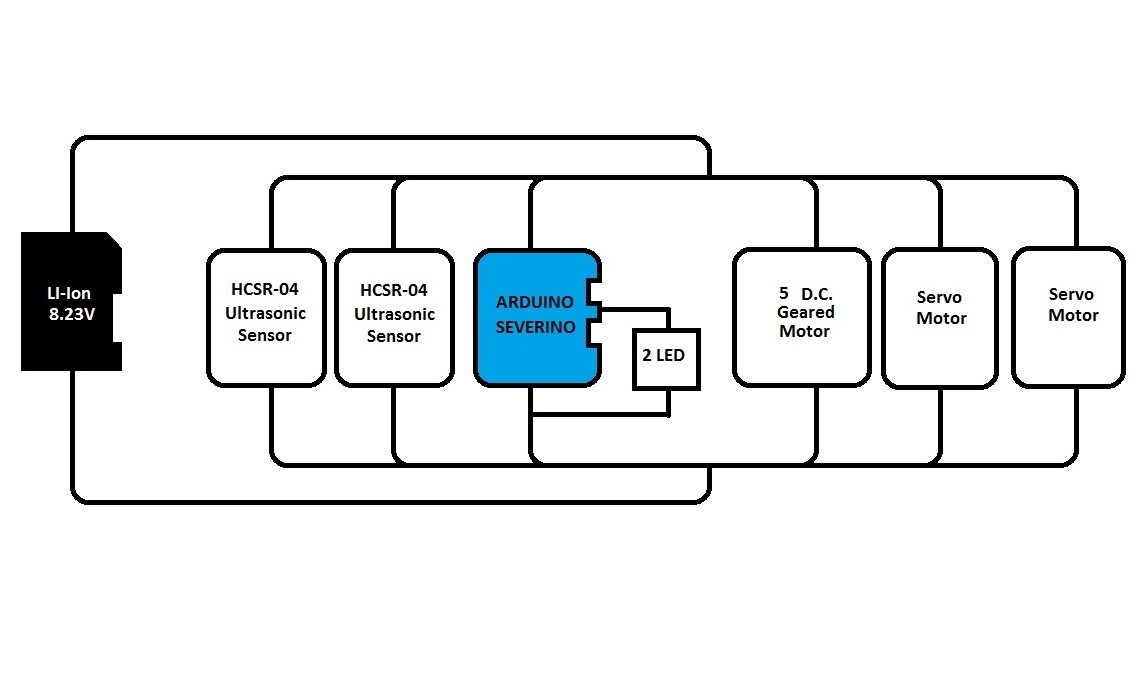
The Block diagram
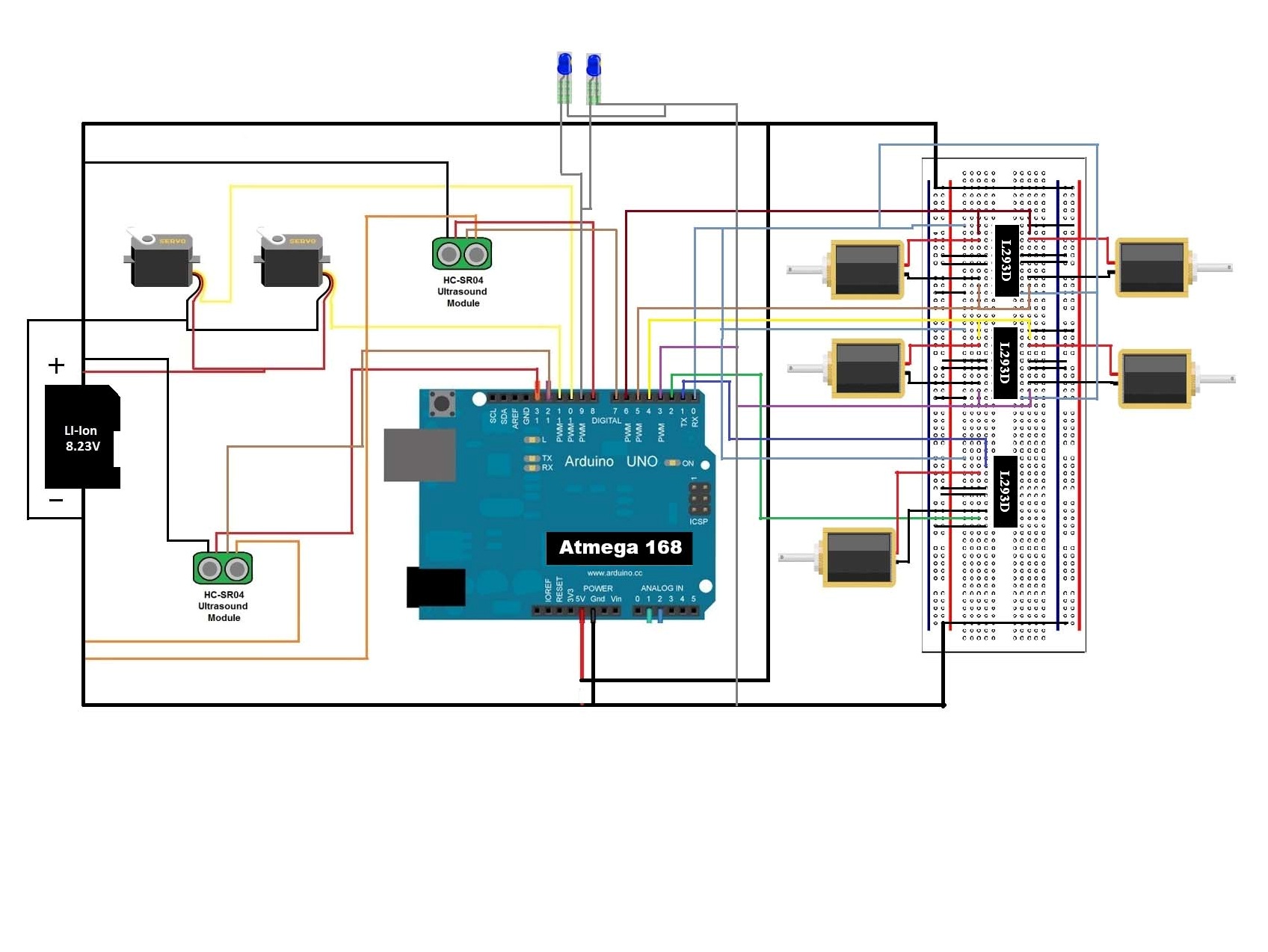
The Circuit Diagram
the thing its do is very simple.(in the image it is described)
1>it turns left in case of front obstacle.
2>it turns right in case of front and left obstacle.
3>it turns left in case of front and right obstacle.
4>it turns 180 degrees in case of front and right and left side blocked.
5>if it turns 180 degrees and then again finds obstacle.then it stops and if it is already grabbing any object,drop it.

i tried to give it a better look..and in the end I came up with this..
***on the video the 3rd turn was not perfect(180 degree)because i gave it 1 sec delay before detecting object.and i raised my hand before detecting it.Sorry for that.I thought about making a new video.bt the battery got damaged and I am running out of money.so I will give it a try some day
Can solve maze via ultrasound,Can grab object via ultrasound
- Actuators / output devices: 2 servos, 2 LEDs, 5 geared motors in total
- Control method: Full autonomous
- CPU: Arduino S3V3
- Operating system: none
- Power source: 8.23v 1030Mah Li-ion battery (nikon En-El-14)
- Programming language: Arduino C
- Sensors / input devices: 2 HC-SR04 ultrasonic sensor
- Target environment: indoor maze