


Meet Molly..
Meet Molly... She is a automatic wet swiffer.. She works in conjunction with my commercial roomba that I love..
I wanted a simple robot that would pick up where the roomba left off.. In other words to do the mopping in my house.. I could have purchased the companion to roomba known as scooba but that would not have been in true "LetsMakeRobots" form..lol
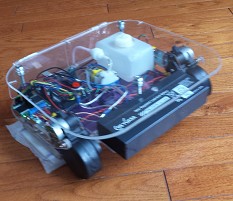
This is another arduino project.. I am using motors salvaged from another roomba (they are great little motor/wheel/encoder combos) with a Polulu MD03A controller (great product).. The controller is an Arduino mega 1280 (cause I had it laying around).. Other sensors include an IR wall sensor, front bumper sensors and software torque sensing.. The pump and pad on the bottom are from a wetjet swiffer that I destroyed.. The tank was just a small plastic jug I had laying around.. The construction is plexiglass purchased from my local Home Depot and cut with a simple jigsaw.
Basically at this point it just wanders around randomly changing directions when encountering and object.. At a random time or when stuck it will go into wall following mode for a random amount of time.. It squirts out a small amount of floor cleaner approx every 10 sec when traveling forward only. That's about it at this point..
The one cool feature that I implemented is a torque sensor which is capable of detecting a struck object that is missed by the bumpers.. In essence I am monitoring if the torque delivered to the motors is higher than a threshold consider this a bump condition..
Navigate around cleaning the floor