


MECXAPOD
Well, I stumbled across this site and watched a few video's and got all inspired. I've been planning to make a fully autonomous robot for the last few months but never got around to it yet. However, I did have an Arduino controller lying around and several servos ... plus of course a box of Meccano!
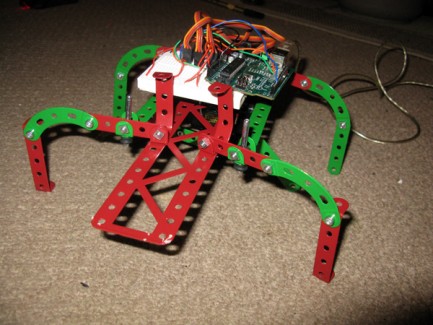
This is my achievement from Sunday afternoon. It is based on the Lynxmotion EH1. I built the base from Meccano and did some basic programming into my Arduino to make it walk forward, backward, left and right. It doesn't walk in a straight line as trying to attach Servo's into Meccano is really hard! There are no sensors either as I haven't got any yet!
Anyway, I have just ordered a Sharp Infrared sensor, a motor driver and some other bits ... Also got lots of spare parts from a dead Roomba ... so hopefully my next project will be a fully autonomous motor driven robot.If that goes well I might concentrate on the Hexapod a bit more as I love insect-bots!
:-)
Walk about
- CPU: Freeduino