



mBot Ranger ROS bot
To learn ROS I have equip an mBot Ranger with a Raspberry Pi 3 that is connected to the controller board of the robot.
The ROS master is running on the Raspberry Pi and in the teleop. example I'm running the Joy node on an PC with a XBOX 360 controller connected.
I have made a python library for the Me Auriga control board that I'm using to communicate with the Me Auriga board with Makeblock firmware loaded. (Find more information on that library here)
Then I have altered the Makeblock-Ros node to use my library and added functionality for reading the on-board sensors of the Me Auriga board.
My ROS package for the mBot Ranger robot can be found here but it is a work in progress.
A video where the robot is controlled by teleop. will be posted soon.
Update 2017-05-10
After some playing around with the robot I decided to skip the Makeblock firmware and using rosserial_arduino instead and it works really good. All the on-board sensors and an ultrasonic sensor are not being published, will post a video showing the sensor readings in rqt_plot.
Sensor data being published
· 1x Ultrasonic sensor
· 1x Sound sensor
· 2x Light sensors
· 1x Temperature
· 1x Battery sensor
Update 2017-06-07
I have changed the plan to use the Makeblock firmware, instead I used rosserial and maked a custom firmware for the Me Auriga board.
I got the teleoperation to work much better with working kinematics and sending out current velocity for each motor in RPM.
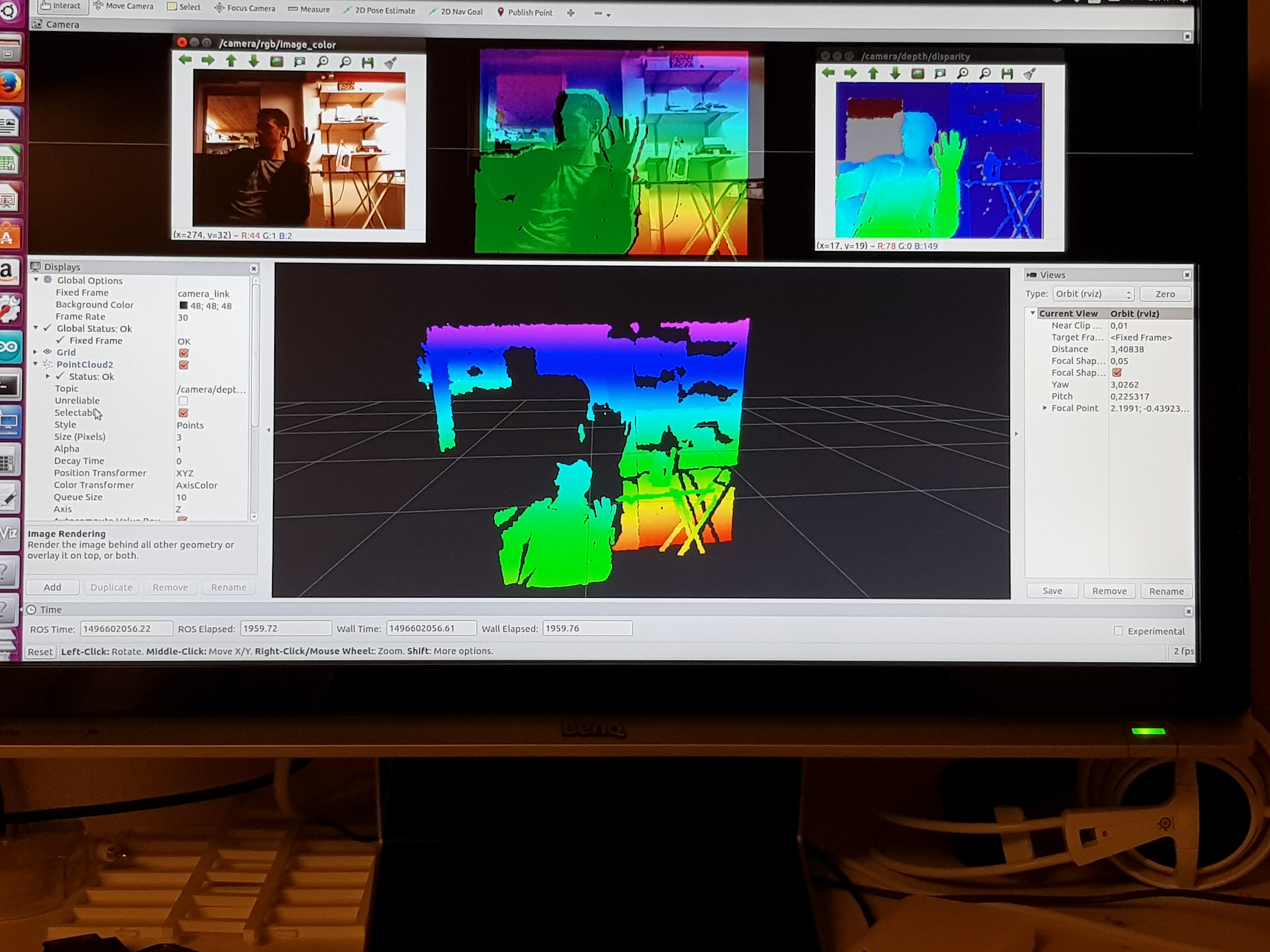
Next step is to make a description for the robot to show it in rviz and show the sensor as the range display type.
I have started to play with the Kinect sensor but I think I have to make a larger robot base to use it on the robot.
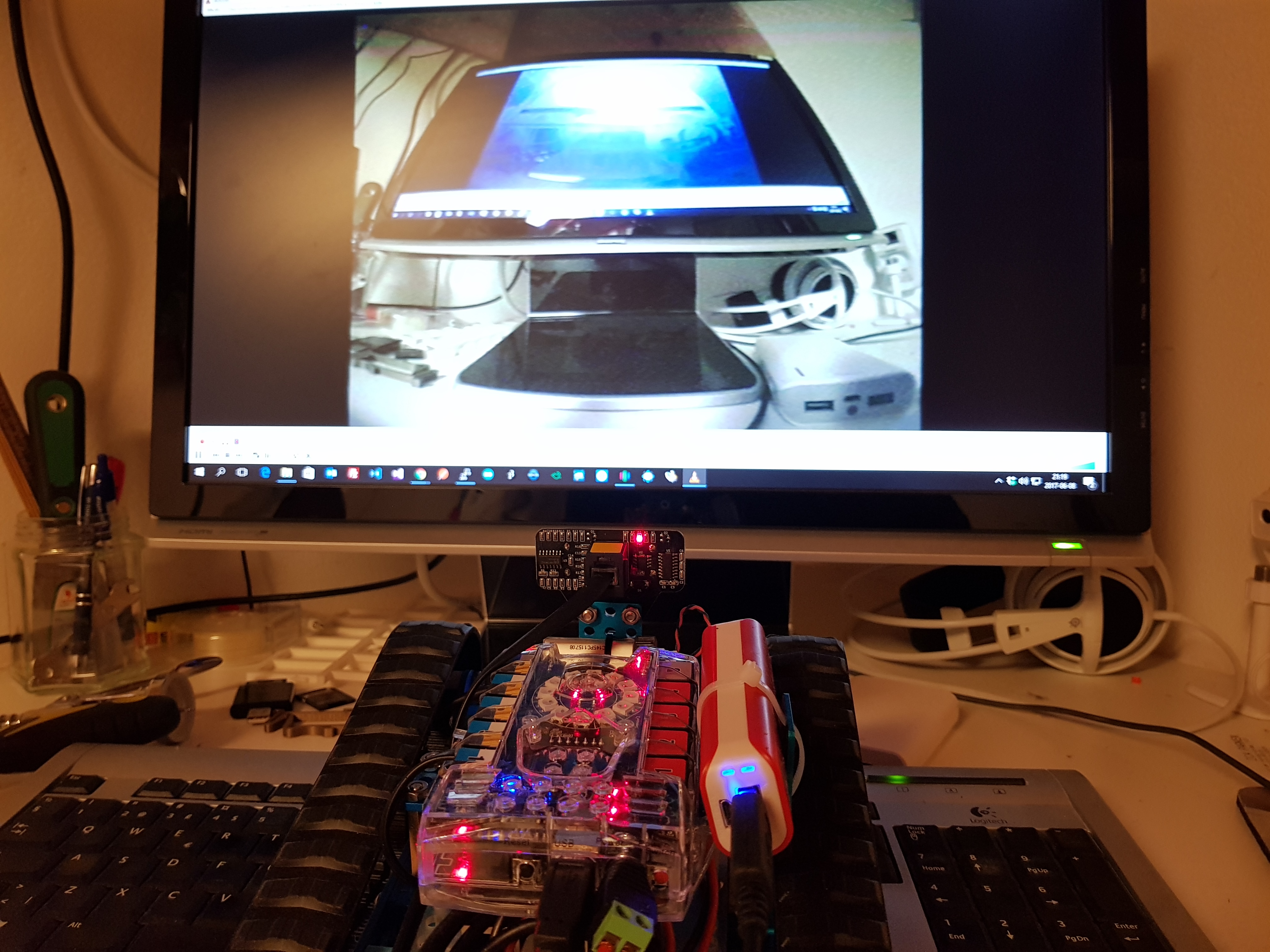
Update 2017-06-08
Now I have mounted a FPV camera for doing teleoperating with FPV googles and it works realy good. It's really cool driving the mBot Ranger around in the house.
The camera mount can be downloaded here

mBot Ranger with ROS
- Control method: Teleoperation (for the moment), ROS
- CPU: Arduino Mega, raspberry pi 3
- Operating system: ROS
- Power source: USB power pack for Pi, 8 1.2v Ni-MH (9.6v)
- Programming language: C++/Python
- Sensors / input devices: battery monitor, Ultra Sound, Sound, Line sensor with 2 IR photodiodes, Temp, IMU
- Target environment: indoor