


MBF v1
MBF v1 (Mobile Bot Follower)
Description.
This small bot will follow a white line over a black ground. The line could have discontinuities of 0.5 cm or 1 cm. Also, it can contain bifurcations, so the bot must decide wich line to follow and know if it is the end of a line or a discontinuity.
The hardware uses an Arduino Duemilanove with ATMEGA 168 and two personal shields for it.
This bot is design for competition.
Working ...
1 Circuit Design
1.1 Motuino v1.2
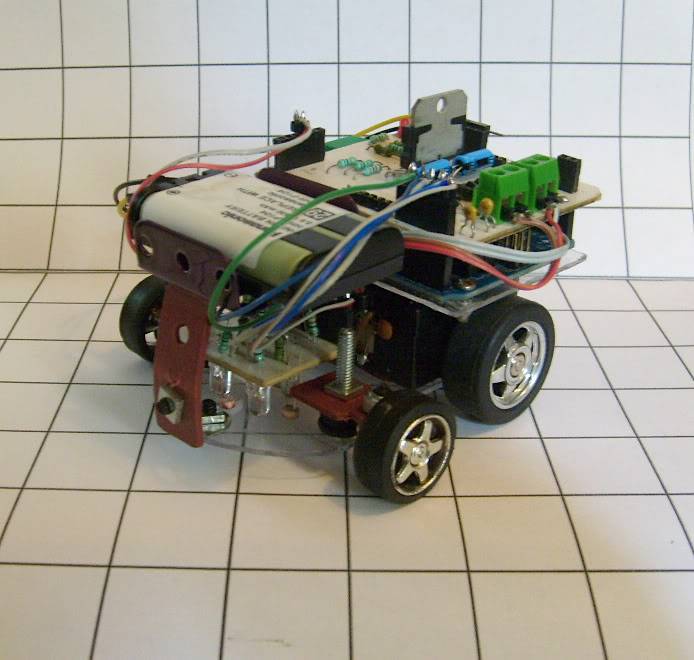
The Motuino board is used to control two DC motors using the L298 with two pairs of shottcky diodes. Also it contains connectors for the sensor board and it's possible to connect two servo motors.
The figure 1 shows the board designed in one layer. 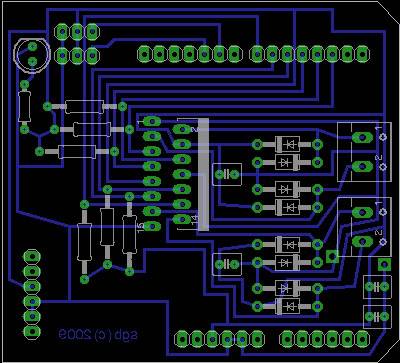
Fig. 1: Motuino v1.2 Design
1.2 Sensor + Design
This board uses an array of photoresistors with a LED matrix configuration. This configuration will be use with a semi fuzzy algorithm to obtain 3 parameters like: black, white and gray. The estimated distance from the sensor to the floor is 0.6 cm. In figure 2 is show the pcb design of the board. Figure 3 is the assembled board.
Fig. 2: Sensor + Design
Fig. 3: Sensor Assembled
2 Robot Design
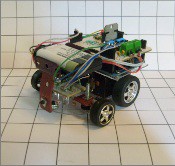
The robot it's a small mobile able to follow a line. MBF stands for Mobile Bot Follower. At this moment the robot weights 200 gr, and use a small rechargeable battery located at the top of the support. In figure 4 we can see the parts and design of the MBF.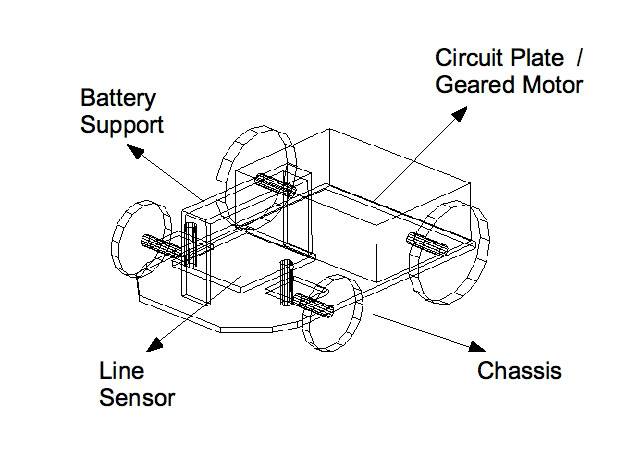
Fig.4: Design of MBF v1
2.1 Chassis Design
The mobile base it's made by plastic sheet of 2mm. It's cutted and molded with a cutter and small dremel. In figure 5 it's show part of the chassis with front wheels. The geared box use two DC motors that are attached at the end of the chassis. The control of the motors will use a fuzzy algorithm to estimated how many degrees will rotate bot.
Fig.5: Plastic chassis of the bot
3 Algorithm Design
Soon ...
4 Testing Track
Soon ...
5 Testing Videos
4.1 Testing First Algorithm
Soon ...
Vid. 1: Testing MBF
Line Follower
- CPU: Arduino Duemilanove
- Power source: 3.6v Ni Mh
- Programming language: arduino language based on C/C++
- Target environment: indoor