



Max 14 - Remoted Controlled Robot
This robot uses a Technological Arts Microcore11 HC11 processor, (2) Devantech SRF08 Range Finders (I2C) and a Devantech Magnetic Compass. QRB1134 based homemade wheel encoders are mounted on the drive wheel to measure distance. The Chassis is a Zagros Robotics Max 14 Square mobile robot base with a few extra decks.
The HC11 controls the motors driver and communicates with the SRF08s and Compass module. The SRF08 and compass module use the I2C bus to communicate. This would allow up to 14 more SRF08s to be added the robot without using any additional I/O (additional SRF08 information https://www.zagrosrobotics.com/shop/item.asp?itemid=571&catid=3)
The higher intelligence is handled by various programs running on a remote laptop. This also keeps the laptop out of harms way, and allows the robot to be remotely stopped when required.
Lower Deck Detail
The lower deck holds the batteries, power distribution board and HC11 / backplane. Development started with (8) D batteres. This was later upgraded to a 12 amp-hr, 12 vdc sealed rechargable battery. The power distribution board has a 3 amp fast acting fuse to prevent excessive smoke escape.
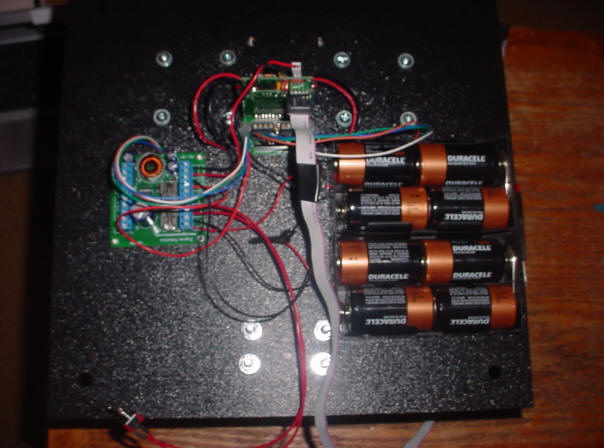
Later, the D Cell batteries were replaced by a 12amp-hr, 12vdc, sealed, rechargable battery. The battery is held in place by Velcro. The Velcro holds the battery in place, but allows it to be removed for recharging or transporting the robot.

Replaced the MicroCore HC11 with a new SRV-1 Blackfin Camera and WiFi module.
(https://www.zagrosrobotics.com/shop/item.aspx?itemid=805)

I also modified one of the examples (in c#) to control the robot.
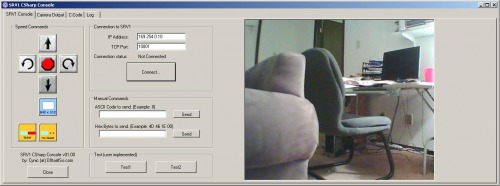
Test Console to remotely control the robot.
Remote Controlled or Autonomous Robot
- Actuators / output devices: 12VDC Motors
- Control method: Bluetooth
- CPU: HC11
- Power source: 12vdc
- Sensors / input devices: 2 x QRB1134 (wheel encoders), SRF08 Range Finders, Devantech Compass Module
- Target environment: Indoor Robot