


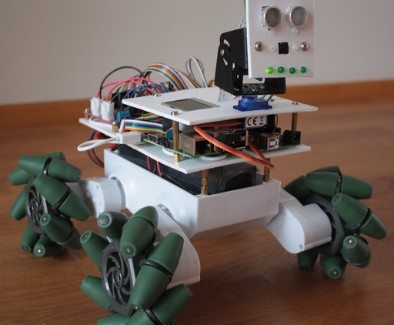
Marvin - a 4WD mecanum wheel driven robot
After reading about Duanes Rover5, I decided to try to build my own. It is still not finished so I will update this page on a regular base.
The following diagram gives an overview of the components (hardware and software) actually used in the robot.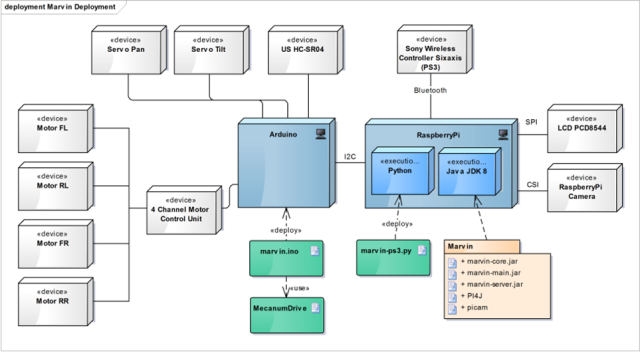
The components diagram shows the different software components and where they are deployed. On the Arduino, it is mainly the classes to support the motors and handling the mecanum wheels. The Raspberry Pi hosts a Python script for the communication with the PS3 controller. The rest is written in Java using the Pi4J library.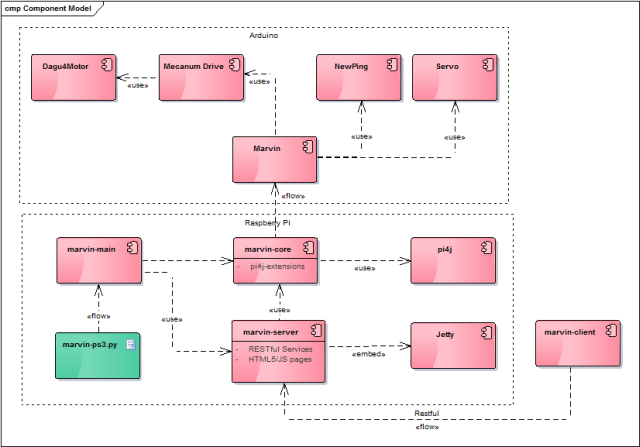
The embedded Jetty is used to offer RESTful services for client programs. The Arduino is connected via the I2C interface to the Raspberry Pi.
Control method: remote CPU: Arduino Mega, Raspberry PI Programming language: Arduino C, C++, Java, Python