


maroyaka
12.5.2012
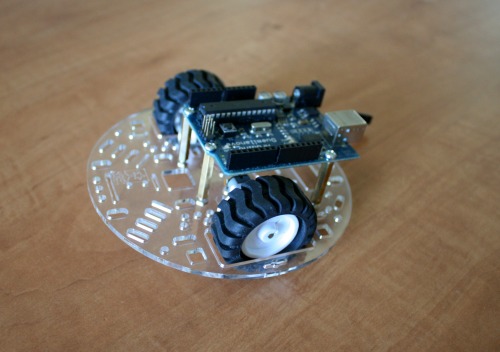
the plan is to reuse arduino, sensors and DC motors with wheels from old bot but put it on the new chassis. the purpose is to have circular bot so that it will be able to navigate maze withour getting stuck on the corners as the previous square-shaped one. :)
21.5.2012
plan is to use IR analog sensors front and on one side (to follow wall) and 2 digital IR sensors on the sides to just detect walls/crossings. i am still considering putting some odometers on the wheels, just not sure yet about the way to treat the data.
15.1.2013
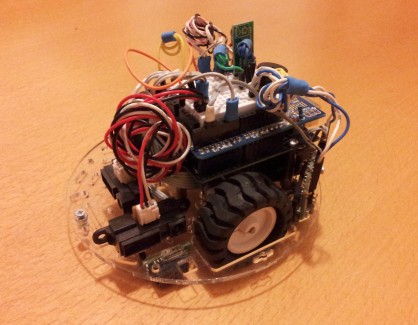
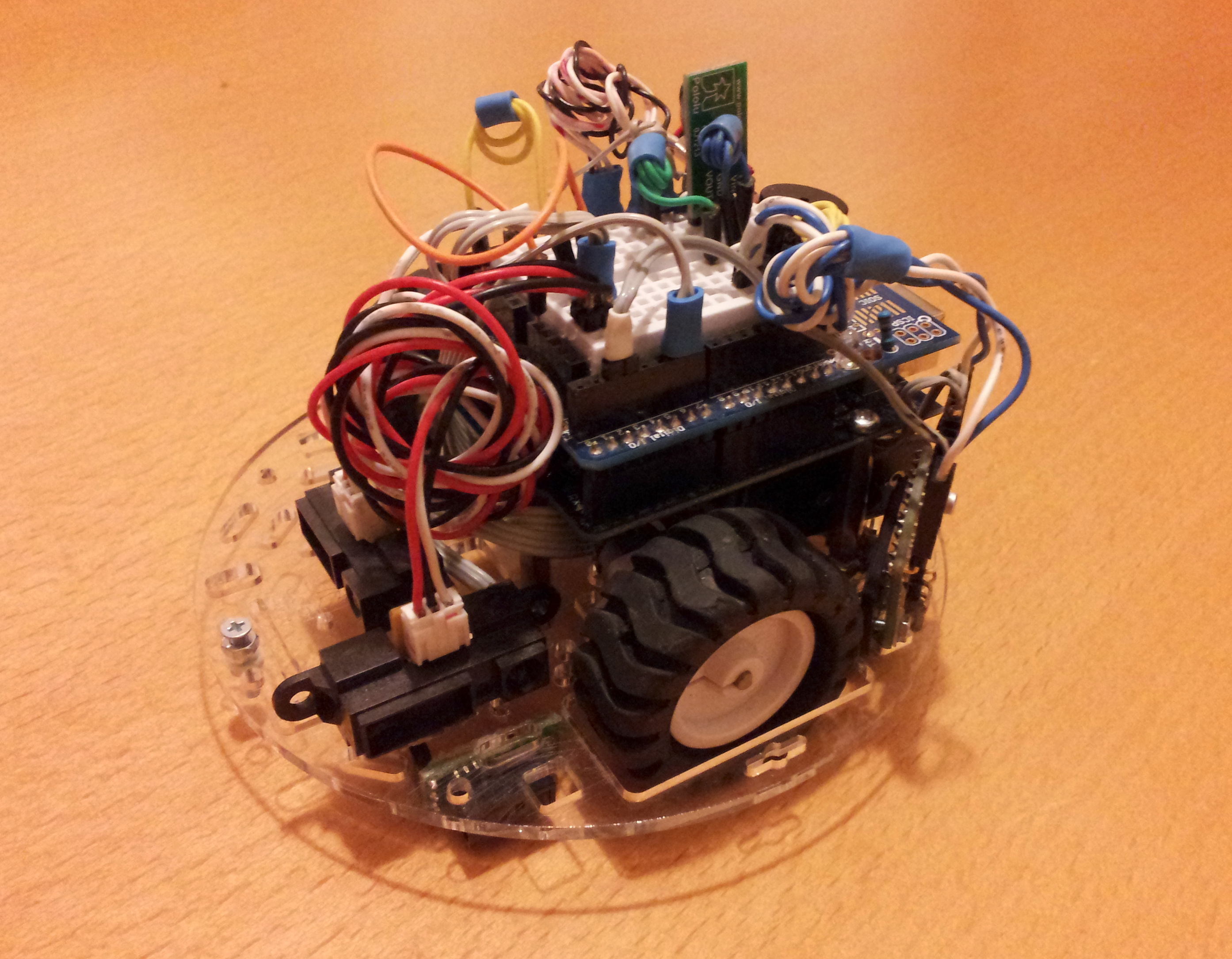
after some time there is some progress! :) i've finally found smoe time to spend with the robot again and put more components on it, now it is able to move - arduino, QIK and battery pack is there as well as boost regulator (to only use 3 AA but be able to supply 5V for sensors and motors)
i took two pictures - one showig the bot from front left with QIK on the rear left side and arduino with breadboard on top.
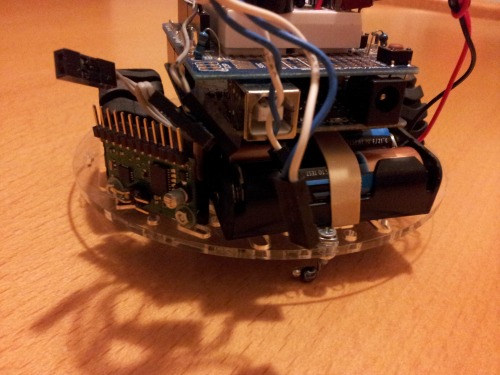
second one is from behind and you can see the battery pack, QIK and arduino as well as homemade bead-ball coaster underneath.
the whole fron part of the bot is left free to be able to accomodate sensors for wall detection.
21.1.2013
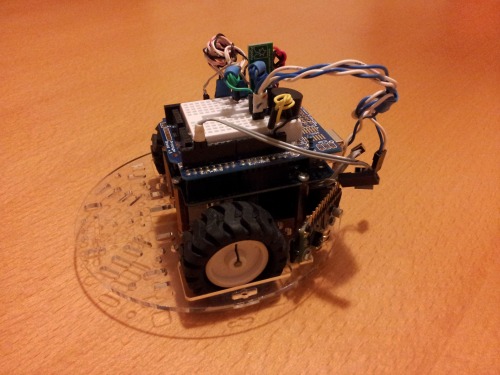
i put 2 sharp range finders (gp2y 10-80cm and gp2d 4-30cm) on top of the front part and 2 sharp digital proximity sensors on the side to detect wall. i will have to move those a bit though, as to be able to detect crossings on both sides of the bot.
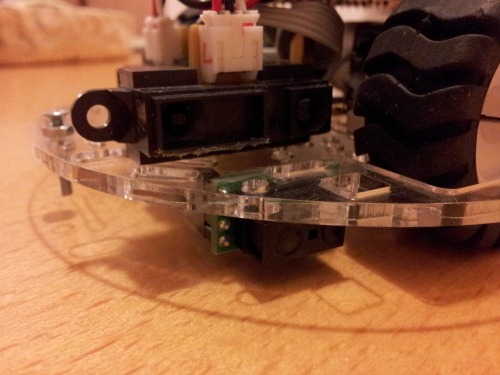
i still have to do some tests to show, whether the signal is not affected by reflexions from the shiny body material.
15.02.2013
i added two videos of testing sensors and following the wall. now i am working on the navigation in maze and follwoing the left-hand wall. videos with the movements added.
02.03.2013
turns are getting more precise and there is detection of dead end to make Uturn. new video added.