


Mappy (the mapbot)
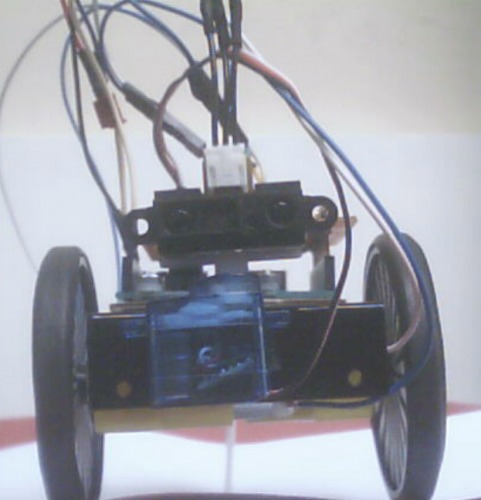
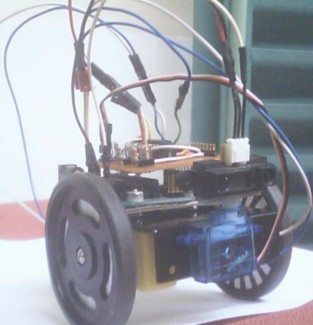
So after putting together and taking apart a few prototypes starting with this ugly mofo I'm finally arriving at something I like. It's a simple start here class sorta robot allthough it has a specific purpose which is: environment mapping. Therefore it is outfitted with a pair of homemade wheel encoders, so that I can measure how much the wheels are turning, and thus calculate how far it is moving. I'm having a hell of a time getting the encoders to work properly though. These IR sensors are very sensitive and the slightest change in light, distance or angle messes up my readings :(
Anyway for now I'm calling it Mappy. I'm also considering simply MapBot. Or perhaps RoboBob. My girfriend thinks it's extremely cute and wants me to name it after my petname for her which is Miti. Perhaps Miti2.0 has a bit of a ring to it :D
In the process of creating this bot I had to make a shield for my Arduino, which has now been expanded to connect the two QRB1134 sensors for the wheel encoder. Here are the parts of my robot separetely:


Future plans for Mappy..well 1st of I wanna get the encoders to work smoothly, and then start doing some PROGRAMMING!! Wheeepeeee!! But I'm also planning to add two frontal bumper sensors and at some point I wanna add an extra servo to make a pan and tilt mechanism for the IR sensor AND I wanna add OddBot's compound eye too (I bought one when I ordered a bunch of motors and servos recently).
For now it's powered by an AT power supply and sends the mapping data to my PC via USB, but I'm planning to get 4 x NiMH AA batteries and a bluetooth module ASAP to make it truly mobile.
.....:... Aniss
Environment mapping (soon I hope)
- Actuators / output devices: 2 x DC motors and 1 x microservo (from DAGU)
- CPU: Arduino Duemilanove (328)
- Power source: AT power supply (later 4 x NiMH AA batteries)
- Programming language: C++, Arduino
- Sensors / input devices: 1 x Sharp GP2D12, 2 x QRB1134 (wheel encoders)
- Target environment: indoors