


Mapping robot
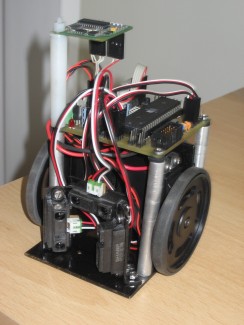
Hi Everyone, great site. Just created an account so i thought i'd share my robot with you. I originally designed this robot as a micromouse and i got it to navigate through a maze but decided to try and get it to do other things. I built a robot at university that was able to navigate and, by sending data to a pc, create a primitive map. It wasn't very accurate so im now trying to improve on this with my latest robot. This robot uses modified servos to drive. Theyre modified for continuous rotation and i ripped out the electronics inside and designed my own pcb to replace it, and it now has built in encoders using IR. It has a 3mm stainless steel chassis with aluminium struts to support the control board. Its tough but it weighs quite a lot. It has three sharp IR sensors and the control board uses and Atmel ATMEGA16 or 32, again designed by myself. It also uses a devantech compass and ive just equipped it with an easy radio module.
Update: I originally had my robot equipped with an easy radio transmitter and had built a reciever board to allow my PC to collect data from the robot. But the Easy radio receiver stopped working, i don't know why but i couldn't get it working. I had always planned to swap them for trancievers so this seemed like a perfect opportunity. I have built two new circuits and i can now collect data from my robot and control it from the pc.
Update: My utimate goal with this robot is for it to be able to gather data to create a map and have it displayed graphically on a pc. To start i want to have a robot mimic on the pc screen showing what the robot is sensing. Ive started with readings from the compass which the robot is sending to the pc. I have written a program to receive the data and show it on the screen as a compass. Have a look at the vid!!
- Actuators / output devices: 2 servos
- CPU: ATMEGA32
- Power source: 6V
- Programming language: C
- Sensors / input devices: Sharp IR
- Target environment: indoors