


Maluco
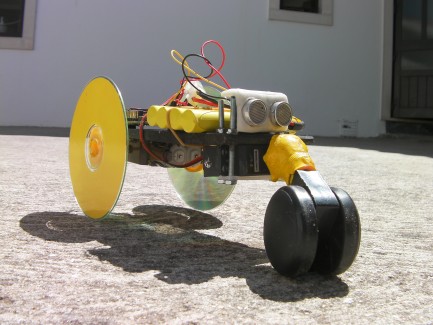
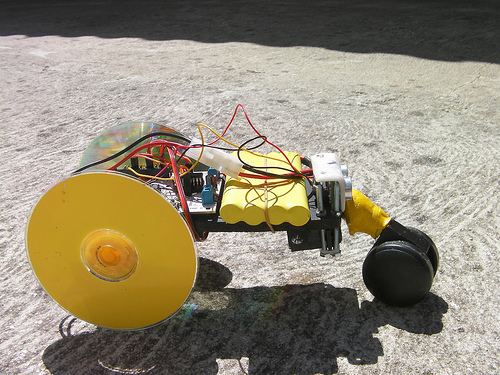
I built this robot to test some different ideas that I had. One of them were the CD wheels and other was the free wheel tilted by a servo.
It ended up to be a crazy (maluco) robot. In full speed it could do massive drifts but was very unstable...
I decided to reduce the voltage given to the motors so it could behave how you can see on the video.
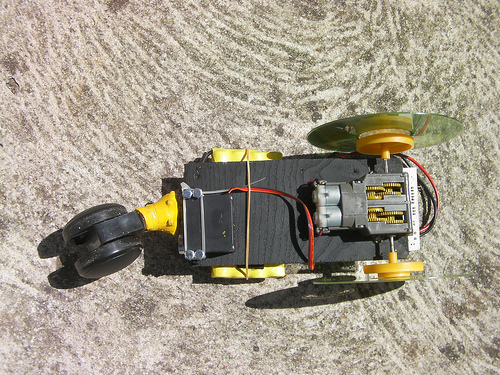
The front wheel is attached to the servo using polymorph:

Navigate around via ultrasound
- Actuators / output devices: Two DC motors
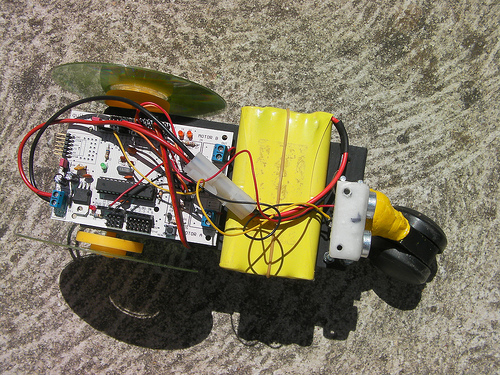
- CPU: motoruino
- Power source: 9.6V battery pack
- Programming language: Arduino
- Sensors / input devices: SFR05
- Target environment: flat surfaces