



MakerFaire Workshop Bot - Prototype
Update: 2012-09-07: Chris the Carpenter has his prototype all done.
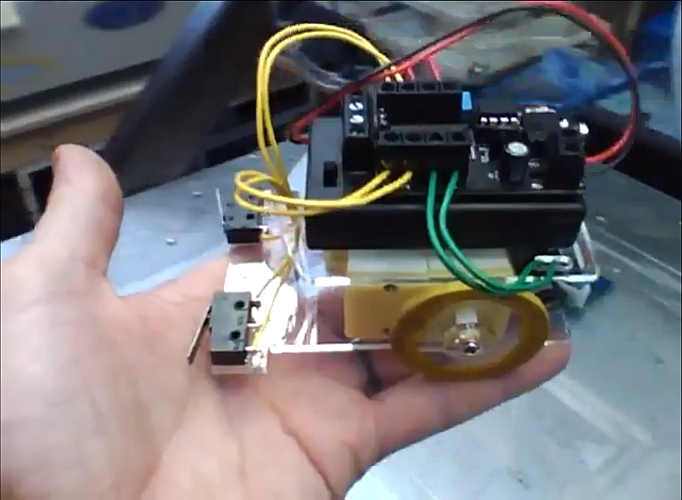
This is a prototype for the Robot Building Workshop Chris the Carpenter and I are going to run at MakerFaire 2012 NYC.
This early prototype is just a couple of 2 in. x 3 1/4 in. plexiglass pieces. Chris is working on the design for the chassis. In the meantime, this will let me experiment with some code.

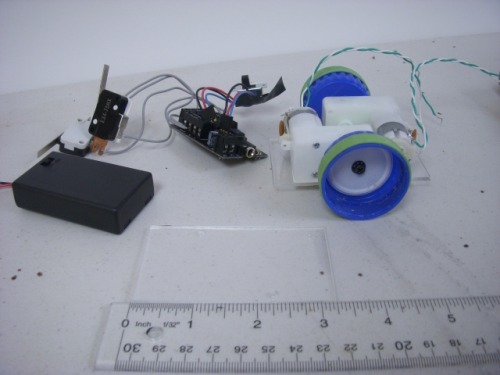
The dimensions were choosen to get the wheels on about 3 1/4 in. center, which is the same as the length front to back.
I drilled some holes in the top deck to run wires.
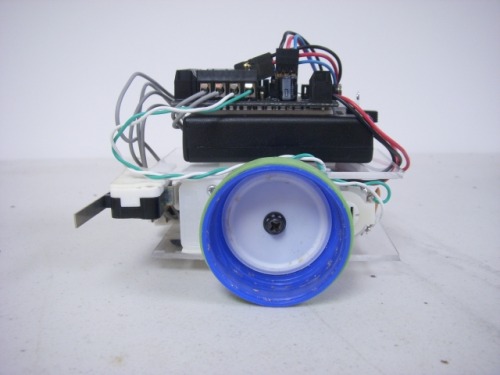
The wheels are bottle caps, which I drilled and attached with #2 sheet metal screws and lock washers.

Two front mounted bumper switches let the robot know if it has hit anything. Note that the bumpers extend to be even with the outer edges of the wheels. I used this tip so that I could use separate digital inputs for each switch.

We probably won't bother with this for MakerFaire, but I included a remote switch to select between 'run' and 'program' on the AXE023 board. It's a pain to move the little jumper.
Prototype for the LMR Robot Building Workshop at MakerFaire
- Actuators / output devices: Solarbotics GM8 gear motors
- CPU: PICAXE AXE023, 08M2
- Power source: 3xAAA alkaline batteries
- Sensors / input devices: 2 Bumper switches
- Target environment: quite smooth flat surfaces