



Make Your Own MSP430 Launchpad based Robot

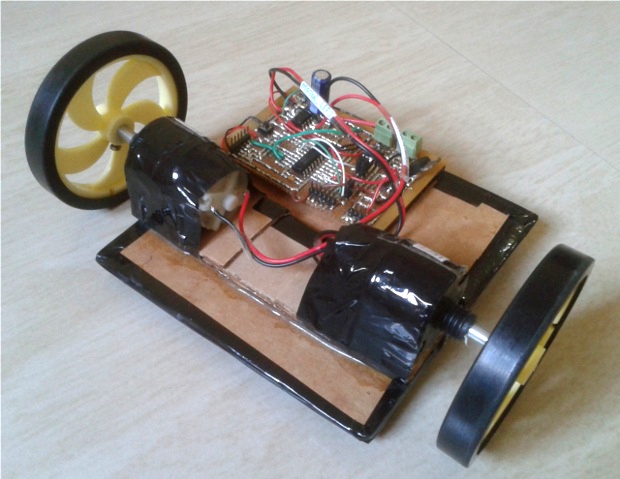
This tutorial serves as a short introduction to Robotics using MSP430 microcontroller and Launchpad development board from TI.Here we will build a small differential powered robot from scratch using MSP430G2553 controller and L293D motor control chip.
This tutorial follows a DIY ethic and can be assembled easily with things lying around in your garage, only exception is the Launchpad micro controller kit which you have to purchase from Texas instruments.
The Frame of the robot is constructed from cardboard and the circuit is assembled on a general purpose PCB using a mixture of through hole and SMD components (mostly resistors and capacitors) .
In case you are not comfortable with SMD you can use through hole components.
The original article can be found here