


MAEP 2.0
Hi! MAEP 2.0 is the second version of MAEP (please check it out if you haven't already). I won't go into all the details about things that are the same as the previous version.
Power supplies:
Same as version 1, a 9 volt alkaline battery for logic and a 4.8 volt NiCad battery for actuators. In addition, I bought a barrel jack adapter for the 9 volt battery, making it easier to hook up to the Arduino.
CPU:
Same Arduino Uno as the original MAEP, this time mounted on two of the headers that came with my Boe-Bot. It was hard to find a configuration that worked, and now both my standoffs are on one side of the Arduino, making it a bit unstable. After constantly plugging in the USB cable and taking it out to reprogram, I've found that they also tend to get loosened and I need to periodically tighten the screws.
Motors:
Here is one key difference between version 1 and version 2. Instead of using HiTec HS-311s, I am now using two Parallax continuous rotation servos for the wheels, and one standard Parallax servo for panning the distance sensor. Given that the continuous rotation servos weren't originally standard servos that I modified, it's a lot easier to center them (they also have potentionmeters to make that job easy). I can also say that I "cheated" less in terms of wheel mounting, they are actually designed to be used with these servos ;)
Chassis:
I used the old Boe-Bot chassis of course, which seems to me to be a lot sturdier than my old CD design. Having an actual tail caster helps as well, I didn't really like how the battery was dragging in my old design. On MAEP 2.0, the NiCad is secured to the underside of the robot with a zip-tie, and the 9V alkaline just being held in place by a loop of tape. I had to tear my old breadboard off of MAEP's old body, which turned out to be a really bad idea. The adhesive backing peeled off, taking some of the connecting strips underneath the bread board with it. I had to put them back in one by one... at least I can now say I know how a breadboard works! Anyways, I cut out some thick paper from some card in a Jameco catelog I believe, and secured it underneath the breadboard to prevent stuff from falling out again or any short circuits from occuring. Now that it doesn't have adhesive backing, I use a rubberband to hold it in place.
Sensors:
As for MAEP 2.0s sensors, I still have the Sharp IR distance sensor, however, it is now mounted pointing downwards for cliff detection. I've also dabbled with using it for line following. There is some change in values when it's over a dark surface vs. a light one, but it's small and hard to get the robot working.
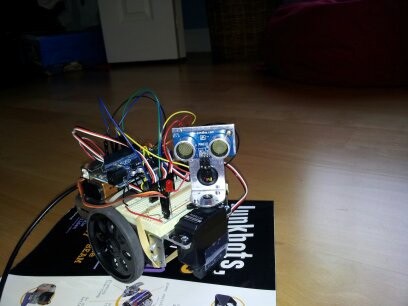
I recieved a Parallax Ping))) sensor and mounting bracket, which is really how this whole redesign started. I had lost interest in Basic Stamp programming, but I wanted to take advantage of this sensor. With the Board of Education already removed for another project, I decided it would be a perfect opportunity to swtiching over to using the Boe-Bot chassis... and so I did! The ultrasonic sensor pretty much takes the place of the Sharp sensor in my previous MAEP.
The code is attached, feel free to use it. I had to put it in a zip file because LetsMakeRobots doesn't let you upload the new Arduino file extension .ino. Hopefully I'll get some more pictures up soon ;)
navigate in various ways, teach me about robotics
- Actuators / output devices: 2x parallax continuous rotation servos, 1x parallax standard servo
- CPU: arduino uno
- Power source: 4.8V 700 mAh NiCd, 9V alkaline battery
- Programming language: Arduino Processing
- Sensors / input devices: Sharp IR, PING))) sonar
- Target environment: indoors