



Mac
Mac is a line following and obstacle avoiding robot. As a line follower it follows the white path on black surface. When it detects an obstacle on the way it stops a short time and changs its way to not crush the obstacle. Therefore, it keeps moving and finds its own way.
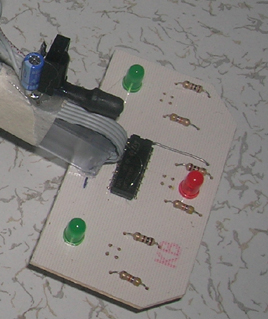
It has three CNY70 reflective optosensors to detect the white path on black surface and an IR sensor to detect the obstacles while it follows the path. The IR sensor circuit was prepared by using TSOP1738 IR Receiver. It is controlled by PIC16F628 microcontroller that was programmed with C. Its two dc motors are driven by L293D.
Line follower and obstacle avoider
- Actuators / output devices: 9 volt dc gear motorsx2
- Control method: autonomous
- CPU: pic16f628a
- Power source: Standard 9 Volt Battery
- Programming language: C
- Sensors / input devices: 3 Cny70 and tsop1738 infrared receiver