



Lunchbot II
This will be my first "real" robot. I.e. my first robot with brains. My last lunchbox robot was done in a small team as part of a first year engineering course.
Lunchbot II is going to be built in little stages. Eventually I want it to be able to roam around free all my itself without supervision. Map out new areas it finds, comunicate with its peers and find its own way to a home base station to charge itself.
Right now I just want to build the H-bridge and make a program to let it drive around randomly.
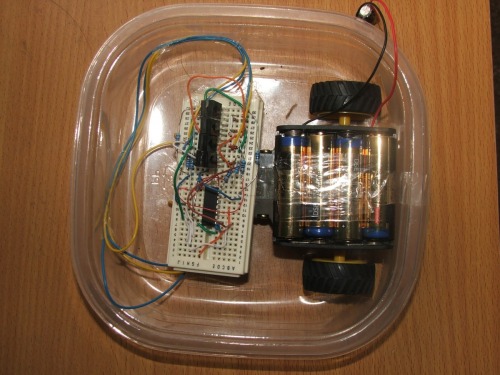
One H-bridge assembled one to go. This takes ages without basic tools. I'm just grateful I have some celotape

Both H-Bridges assemble now without anything going irreversibly bad. I haven't had any luck programming a proper random number generator yet. I have an a bit one but it's a bit repetitive.
Explore
- Actuators / output devices: Tamiya twin gearbox
- CPU: PIC16F505
- Power source: 4xAA batteries
- Programming language: C
- Sensors / input devices: None yet - Will have IR or Photo
- Target environment: Indoors - Carpet