


Long-Haul
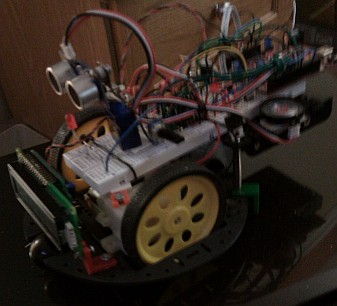
I just built this little bot this morning! The shape (and code) seems excellent at keeping this bot from "getting stuck" and if I were to add a small sponge to the bottom I could use it to clean my bathroom after in a while! A 5 cell rechargeable AA setup provides more than enough power for flat indoor floors. (Even at relatively slow speeds, the robot runs nicely in a fairly straight line.) The green flanges in back don't drag the ground but function to keep the slightly tail-heavy robot from tipping over. It has hardware to add sound, and I do like the idea of some form of remote serial communication to the desktop pc. I am using straight-forward Arduino C/C++ code (still, one of the easiest and most efficient ways to program a small bot). A Digillent Uno32 provides the guidance and the PING))) does a obstacle alert and a search for a clear route. The pot controls the sensitivity to distance. (I am waiting on more information on technical details of my Officially (too expensive) Arduino Robot.) Hopefully, a college will "adopt" some and have a course based on more "advanced" programming of them. I LOVE building a new bot, and putting one together and getting the initial programming going in half a day is reasonable for me.
Autonomous room navigation, possible cleaning capability
- Actuators / output devices: 2 motors.
- Control method: Autonomous.
- CPU: Digilent Uno32
- Operating system: Arduino
- Power source: 5 AA rechargables
- Programming language: C/C++
- Sensors / input devices: Ping)))
- Target environment: indoor flat surfaces