



Little Red BoBette
This is 'Little Red BoBette', another member of BoBs army. The name is taken from an old Prince title, 'Little Red Corvette'. BoBette is my first female robot. She is the brideof FrankenBoB.
Assembly
The chassis parts were 3D printed,Decoration was done by my wife, the lipps are made out of Sugru. The eyes are available at home depot. The hairs were maid out of christmas deco.
Elektronic
Part list:
- Arduino Mini 3,3V
- 4 x HXT900 9G servos
- 1 x Sharp GP2Y0D810Z0F digital distance sensor
- 1 x Bluetooth module HC06
- 1 x 3.7V Lipo
- 1 x 60x30mm vero board
The elektronics is completely a 3V design. So a single 3.7V Lipo is used for power supply. The HXT servos are powered with 3V, too. The Arduino mini board is plugged on a vero breakout board. All Arduino I/Os are connected to 3pin headers.
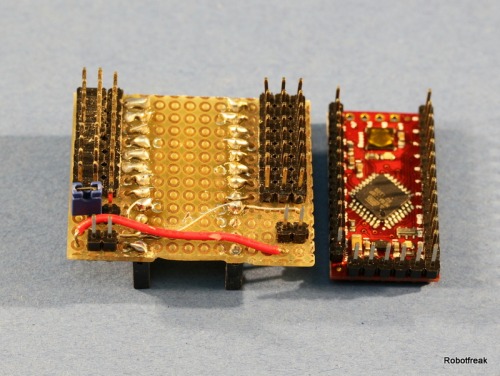
The Bluetooth module is plugged on a piece of vero boards, using a FTDI pinout connector to the Arduino mini . The complete elektronics is very compact and fits between the servos in the head of the biped.

On the backside is a jumper as power switch and a cable for charging the Lipo without open the robot case.

Schematic


Software
The software is more or less identical to FrankenBoB.
Changes has been made for the different sensor and the movement poses. Remote and Navigation sketch have been combined into one sketch: The movement poses can be created form the BoBPoser GUI via Bluetooth.
Credits:
BoBette is a 4 servo biped using 3D printed parts. The original BoB is created by LMR user K120189.
The Poser GUI is originally written for the famous FOBO robot by Jonathan Dowdall. It has been adopted to work with the 4 servo BOB instead of the 8 servo FOBO.
Walks araound and avoid obstacles
- Actuators / output devices: 4 servos HXT-900
- Control method: Bluetooth
- CPU: Arduino Mini
- Power source: 3, 7V Lipo
- Programming language: Arduino C++
- Sensors / input devices: Sharp GP2Y0D810Z0F digital distance sensor
- Target environment: indoor