


Little PIC
I wanted to build something quick and fun with my newfound PIC knowledge. I had been wanting to build my own version of Frits' Little 8 for a while, so I decided that now was the time. I was thinking that the two Solarbotics GM10 motors that had failed as drumsticks might work just fine as motors -- the gears tended to jam when the drumsticks hit stuff, but as motors they wouldn't be subjected to the same types of sharp, sudden stresses. So I went down to Home Depot and grabbed a handful of free paint mixing sticks, soldered up a quick circuit board to hold sockets for the PIC and the SN754410 motor driver, a 7805 voltage regulator, a set of pins for programming the PIC with ICSP, some female headers to mount the RF receiver, and a bunch of screw terminals to hook up all the peripherals.
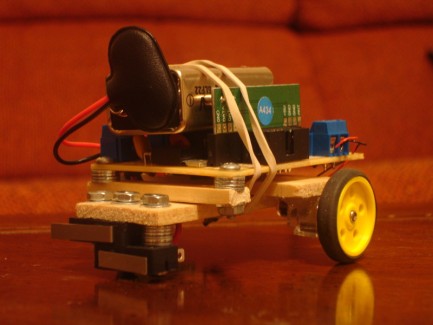
I've already got some old Atari joysticks that I want to use to build a simple RF transmitter like Frits', but I haven't got serial reception working right on the PIC yet. I can transmit just fine, but when I try to receive, the incoming text is all garbled. So for now, Little PIC just runs around and bumps into stuff, as you can see in the video. And since the only switches I could find have much shorter metal blades than Frits', my robot can easily get stuck if he runs into a corner just right.
Eventually I want to glue on some extensions for the whiskers, and get the serial comms working so I can control the robot with the joystick. I figure he can run around at random until he receives some instructions from the wireless receiver, and then he'll just follow those and work as a remote controlled robot. If he goes 10 seconds or so without receiving any instructions, he gets bored and goes back to running around on his own.
Scurry around and run into stuff
- Actuators / output devices: 2x Solarbotics GM10
- Control method: Semi-autonomous
- CPU: PIC 16f690
- Power source: 9v battery
- Programming language: C
- Sensors / input devices: Two contact switches