



Little Black PI wagon


This is the beginnings of my little distributed computing bot. The brains will be a PI, the motor driver, a Dagu Minidriver. There will be several mini pros driving sensors like a gyro, compass, accelerometer and encoders as well as ir and sonar sensors. I will also have a ps2 teaching/remote control driven by another mini pro. All the uC's and the PI will be linked together via an i2c bus and the PI to other computers with wifi. The main goal of this platform is to have a good easy to mod and room to work bot to test multi task based uC systems. This will be a multi deck platform.
The wheels on it are temporary and will have either track wheels or real tracks. I have not decided as of yet.
I will post more as progress is made.
***UPDATE 2013-07-31***
Added a few more componets to the base deck. Have a 3.3v supply, 5v and 5v for the RPI.
I think i have nailed down the power needs of the bot. To run the RPI and other controllers I will use two 5000mah lipos and a 2200mah for the two motors (will have to order). Going to order two current sensors and a voltage monitor and they will be placed on the lower deck as well. The wheels mounted now are what I plan to use for now.
Slow progress, but some progress.
*** UDATE 2013-08-04 ***
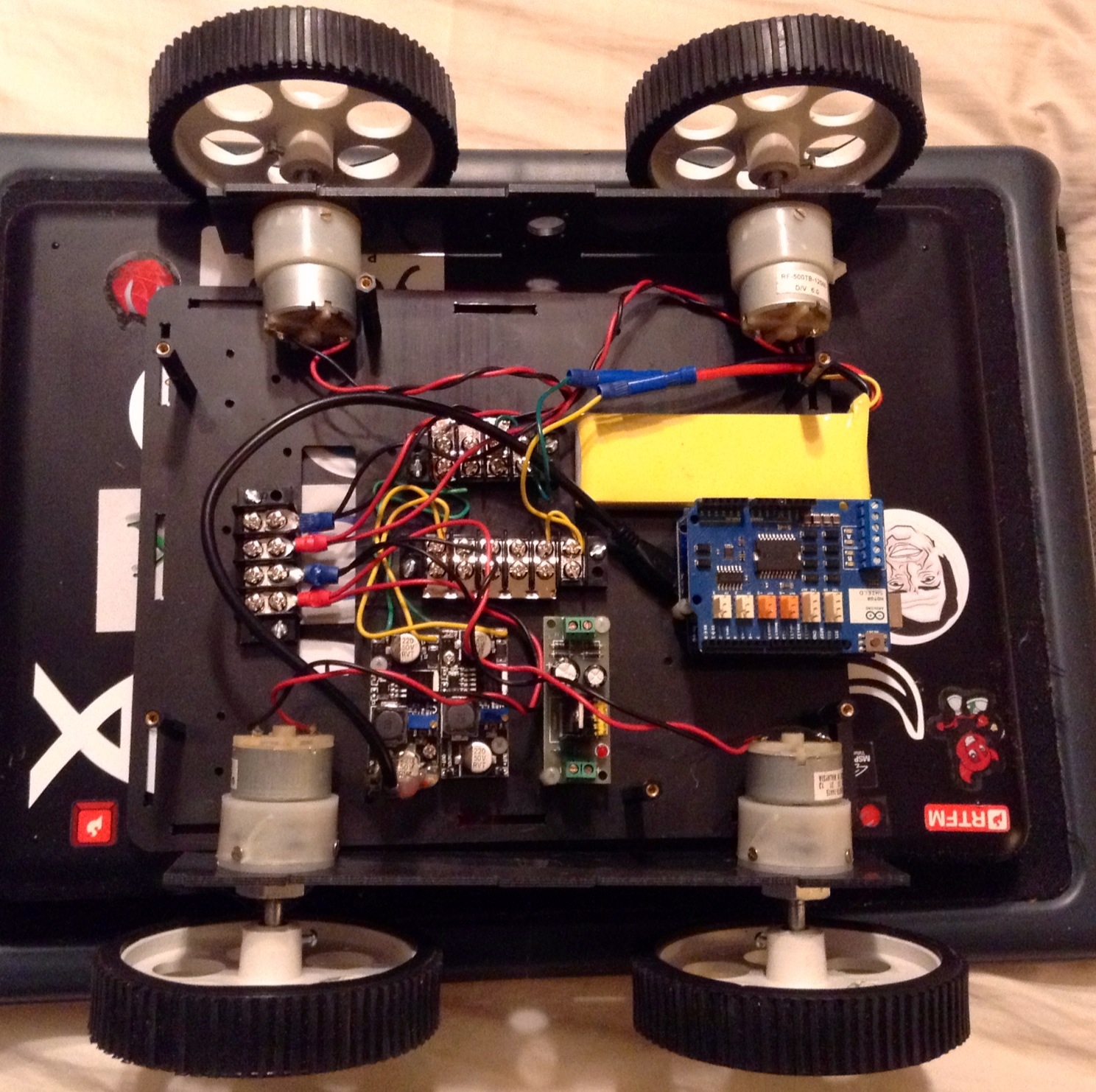
After thinking about it, I have moved to a pre-made chassis I already had that was just about the size I wanted. I have dropped the Dagu mini driver :( and replaced it with an uno and a rev 3 motor shield. The uno will be hooked to the Pi via an i2c bus, so same bat plan, just a new controller and hb.
Experimental platform
- Actuators / output devices: 4 center shaft 100rpm gear motors
- Control method: Rf link or autonomous
- CPU: Atmel ATmega328, arm processor
- Operating system: Debian GNU/Linux
- Power source: 11.1v lipo x2 in parallel
- Programming language: C++, C, Python, TCL
- Sensors / input devices: encoders, compass, 3-Axis accelerometer, 3 IR proximity detectors, 2 SRF05
- Target environment: home