



LineIronBot (Hacked Iron Line Follower)
LineIronBot is my latest robot. I have hacked my dead iron and now it is functioning line follower robot! :D
I was thinking of building a line follower for a few months now, even ordered bunch of reflectance sensors, but real inspiration did not visit me till my wife told me we need a new iron :D I looked at our old one and told myself: This is going to be my line follower robot! :)
So, The parts used so far:
- Old electric iron :D
- Picaxe 28 pin project board and Picaxe 28x1 MCU
- 2 x geared motors from Dagu
- 2 wheels ripped off from cheapy toy
- Ball caster
- Blue LED
- 3 x QDR1114 reflectance sensors
- Switch
- Resistors: 1x330R, 1x100R, 3x10K
- Wires
- Battery holder
- finally, 4 x NiMH AA rechargebles
First of all I had to get rid of heating element and cut off some plastic from inside to make some room for batteries and project board. Openings for wheels cut as well. These I got rid of:

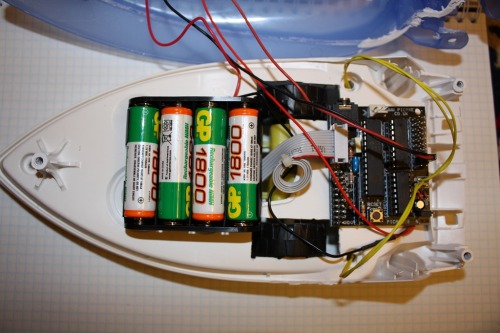
Then components fixed inside:
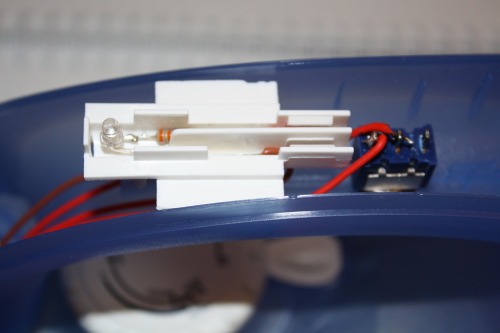
Indicator replaced by an LED and switch fit in:

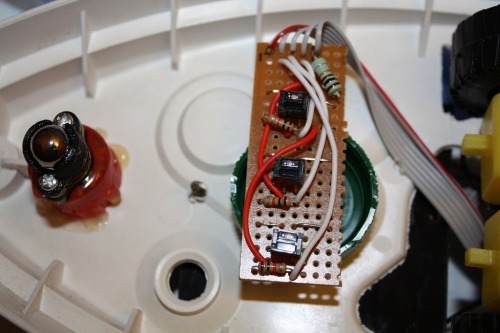
Line sensors soldered into piece of perfoboard and hot glued to chassis as well as ball caster and motors:

Here are pictures of my hacked LineIronBot, complete and easy to store :D


I have attached a small test video, unfortunately I ran out of black insulating tape, so the track is very short :D
I'm thinking of adding more functionality to LineIronBot in future, possibly light seeking. And I want to use the temperature select dial for switching between line follow and light seek modes.
Update 28-Sep-2010
Finally I returned to this project to finish it. Thanks to Open OFFLINE robotics competition. I had to spend some time debugging the code and making it more robust for interruptions in line. I also added external programming socket, which is already became a tradition with my bots :D

The new video shows LineIronBot completing the competition track in little over 50 seconds. I have uploaded my code as well.
- Actuators / output devices: 2x geared motors
- Control method: autonomous
- CPU: Picaxe 28x1
- Power source: 4 x AA NiMH Batteries
- Programming language: Picaxe basic
- Sensors / input devices: Reflective infared sensors
- Target environment: indoor on smooth surfaces